准确度是焊接机器人工作站的显赫亮点。借助先进的运动控制算法与高精度传感器,机器人能精细把控焊枪位置与焊接参数。在复杂焊缝焊接时,其重复定位精度可达 ±0.02mm 甚至更高,确保焊缝均匀一致,完美契合设计要求。这时相比人工焊接易出现的手抖、焊接参数波动和其他问题,工作站可有效避免焊缝宽窄不一、气孔、虚焊和其他缺陷,大幅提升焊接质量稳定性,让每一件焊接产品都能达到质量的标准,降低次品率,同时减少企业质量成本。人体工学手柄减轻操作疲劳?南京钣金焊接工作站
参数调控与管理系统是保障焊接质量的重要组成部分,由参数设置面板、传感器与控制单元组成。参数设置面板提供直观的操作界面,操作人员可根据焊接需求设置电流、电压、焊接速度等关键参数,且参数设置范围可满足多种焊接工艺的要求。传感器实时监测焊接过程中的各项参数变化,并将数据传输至控制单元。控制单元对接收的数据进行分析处理,当参数出现偏差时,及时发出调整指令,确保焊接过程始终在设定范围内进行,该系统能有效维持焊接参数的稳定性,减少人为操作误差对焊接质量的影响。激光切割工作站供应价格传感器实时监测焊接参数变化。
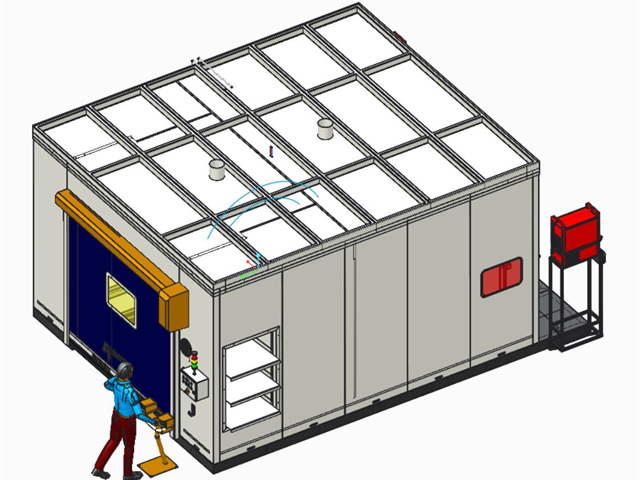
人机交互与编程系统是操作人员与弧焊机器人沟通的桥梁,让复杂的焊接作业变得易于控制。该系统通常包含操作面板、触摸屏与编程软件,支持多种编程方式。示教编程时,操作人员可手持示教器拖动机械臂到目标位置,记录各点参数并设置焊接顺序,系统会自动生成连续运行程序;离线编程则通过三维建模软件在电脑上模拟焊接场景,预先规划路径并进行碰撞检测,再将程序传输至机器人,尤其适合大型复杂工件的批量生产。界面设计注重直观性,常用功能以图标形式呈现,操作人员经简单培训即可掌握基本操作,大幅降低了使用门槛。
运动路径规划与优化系统负责为弧焊机器人规划高效、平稳的运动轨迹,减少无效动作并提升焊接效率。系统基于工件三维模型与焊缝位置信息,运用算法自动生成初始路径,再通过平滑处理消除轨迹中的急停、急转现象,使机械臂运动更连贯,降低对设备的磨损。对于多焊缝工件,系统能按照比较好顺序排列焊接路径,缩短空行程时间,提高单位时间内的焊接完成量。此外,还可根据工件变形情况进行动态路径调整,保证焊枪始终沿焊缝中心运动,避免因路径偏差影响焊接质量。低耗弧焊工作站,兼顾高效与绿色生产。
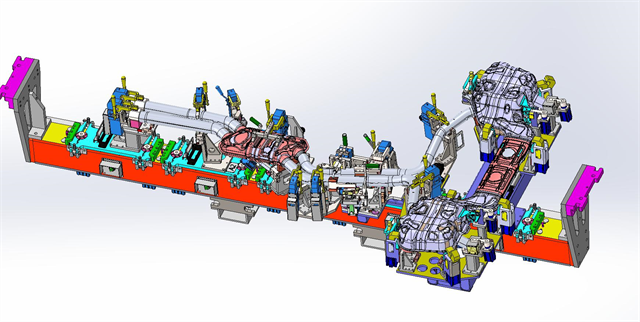
准确的机械传动与定位,是弧焊工作站实现高质量焊接的关键。该单元通常包含多轴机械臂或焊接变位机,通过伺服电机驱动,实现焊枪或工件在三维空间内的灵活移动与精确定位。机械臂的重复定位精度可达 ±0.1mm,确保焊点位置误差控制在极小范围;变位机则能带动工件翻转、旋转,将复杂焊缝调整至较好焊接姿态,减少焊枪运动轨迹的复杂性。传动系统采用高精度导轨与滚珠丝杠,配合减速机构,在保证运动平稳性的同时,提升响应速度,满足快速切换焊接位置的需求。这款弧焊工作站记录手机摄像头座焊接异常数据。激光切割工作站供应价格
优化弧焊工作站参数可显赫提升产品质量。南京钣金焊接工作站
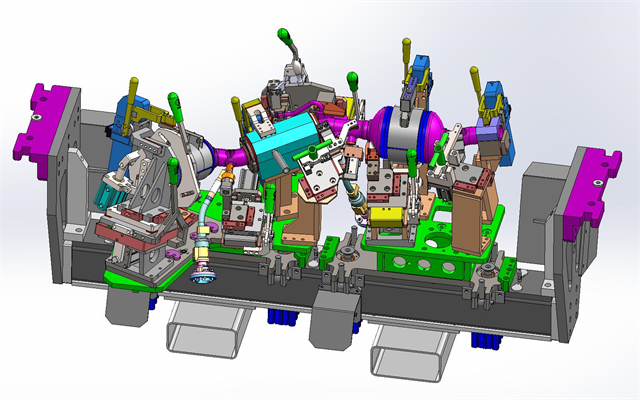
焊接工装夹具通过科学的结构设计,为工件提供稳定可靠的定位支撑,从根源上减少焊接变形问题。其采用模块化定位组件,可根据不同工件尺寸准确调节夹持点,确保焊接过程中接缝对齐误差控制在 0.1mm 以内。夹具接触面经过精密加工,既能牢牢固定工件又避免表面损伤,特别适合不锈钢、铝合金等易变形材料的焊接作业。配合可调节压紧装置,能均匀分散夹持力,有效防止工件在高温焊接时因应力集中产生裂纹。无论是批量生产还是定制加工,这类夹具都能通过稳定的定位性能,让每道焊缝保持一致的高质量水准,为产品可靠性奠定坚实基础。南京钣金焊接工作站