控制系统是弧焊机器人的 “大脑”,负责协调各部件有序运作,主要包含主控制器、编程装置与运动控制模块。主控制器采用工业级微处理器,能实时处理焊接参数、运动轨迹等数据,通过预设程序或人工示教生成比较好焊接路径。编程装置支持图形化操作界面,操作人员可通过拖拽轨迹点、设置焊接速度、电流电压等参数完成程序编写,无需复杂代码知识。运动控制模块则通过脉冲信号驱动伺服电机,将程序指令转化为机械臂的精确动作,同时具备动态补偿功能,可根据工件微小形变实时调整运动轨迹,保障焊接接头的一致性与稳定性。全自动弧焊工作站大幅提升焊接作业效率。合肥钣金焊接工作站销售

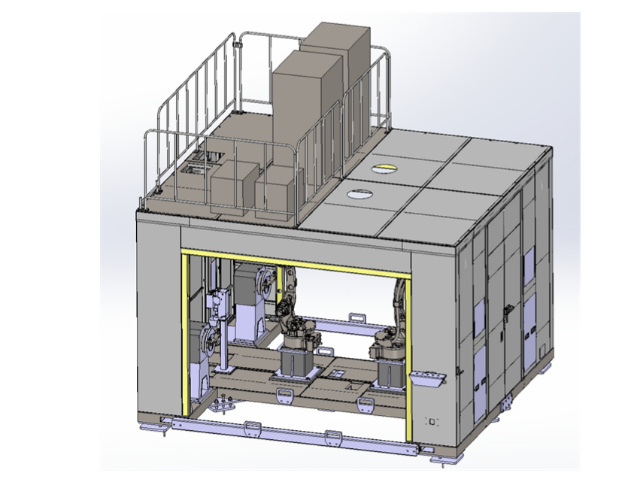
考虑到车间空间的高效利用,工业机器人弧焊工作站采用紧凑化布局与多功能集成设计。小型工作站的整体占地面积可控制在 4-6 平方米,通过折叠式防护围栏在非工作状态下进一步节省空间,适合中小型企业的有限场地。大型工作站则采用立体式结构,将焊接区、上下料区与暂存区进行垂直空间分配,单位面积的产能较传统平面布局提升 50% 以上。同时,工作站的防护围栏可根据实际需求选择透明或半透明材质,既保证安全防护,又不影响车间的整体视野与人员通行。上海弧焊工作站批发自动化弧焊工作站,减少人工操作强度。
机器人自动上下料方案的智能集成能力,使其能与企业现有管理系统形成深度协同。通过工业互联网接口,方案可实时将生产数据上传至 MES 系统,包括工件数量、运行时长等关键信息,帮助管理人员实现可视化管控。同时,系统支持与 ERP 系统联动,根据生产计划自动调整上下料节奏,确保物料供应与生产进度准确匹配。这种一体化管理模式,不仅减少了人工统计的误差,还能通过数据分析优化生产流程,为企业决策提供数据支持。
在空间利用方面,机器人自动上下料方案展现出显赫的灵活性。相较于传统生产线固定的布局,机器人可采用壁挂式、倒挂式等安装方式,充分利用车间垂直空间,减少地面占用面积。对于空间紧张的中小型车间,方案可通过紧凑的机械结构设计,在有限区域内完成多台设备的上下料作业。例如,某精密仪器厂引入该方案后,生产线占地面积减少 25%,腾出的空间可用于新增设备或改善作业环境,间接提升了车间的整体运营效率。
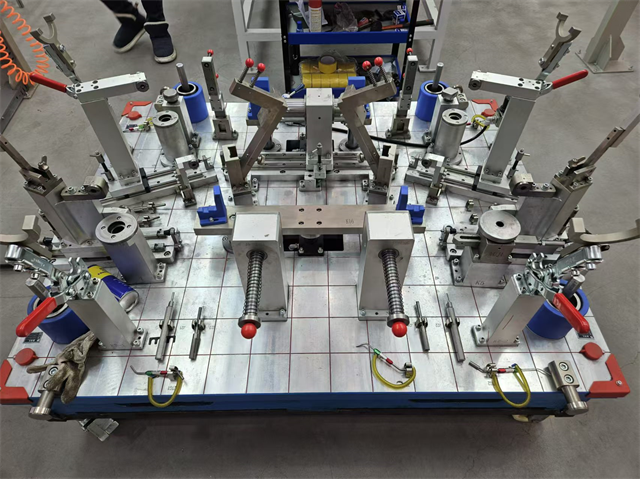
现代焊接工装夹具注重通用性的平衡,通过标准化接口设计实现快速换型。基础框架可兼容不同规格的定位模块、压紧装置和旋转机构,只需简单调整即可适配从小型精密零件到大型结构件的焊接需求。针对管道焊接、箱体焊接、框架焊接等不同场景,夹具配备相应的辅助支撑结构,确保各类工件都能获得比较好焊接姿态。部分夹具还支持数控调节功能,通过数显屏精确控制定位参数,实现焊接工艺的数字化管理。这种灵活适配能力让一套夹具可服务多条生产线,特别适合多品种、小批量的生产模式,帮助企业提升设备利用率。该弧焊工作站记录的数据支持焊接工艺优化调整。

运动路径规划与优化系统负责为弧焊机器人规划高效、平稳的运动轨迹,减少无效动作并提升焊接效率。系统基于工件三维模型与焊缝位置信息,运用算法自动生成初始路径,再通过平滑处理消除轨迹中的急停、急转现象,使机械臂运动更连贯,降低对设备的磨损。对于多焊缝工件,系统能按照比较好顺序排列焊接路径,缩短空行程时间,提高单位时间内的焊接完成量。此外,还可根据工件变形情况进行动态路径调整,保证焊枪始终沿焊缝中心运动,避免因路径偏差影响焊接质量。弧焊工作站实时记录焊接速度等关键工艺参数。南京铁丝网+防护光板焊接工作站厂家直销
汽车独用弧焊工作站同步记录保险杠支架焊接数据。合肥钣金焊接工作站销售
电弧监测与反馈单元是保障焊接质量的重要环节,通过各类传感器实时捕捉焊接过程中的关键数据。电弧电压传感器与电流传感器持续采集电弧参数,将信号传输至处理模块进行分析,当参数偏离预设范围时,及时发出调整指令。焊缝跟踪传感器借助光学或电磁感应原理,识别焊缝的位置与走向偏差,引导机械执行机构进行动态修正,确保焊枪始终对准焊缝中心。该单元还能记录每次焊接的参数曲线,为后续质量追溯与工艺优化提供数据支持,帮助操作人员积累经验,提升同类工件的焊接一致性。合肥钣金焊接工作站销售