- 品牌
- 台达
- 型号
- 咨询沟通
- 加工定制
- 否
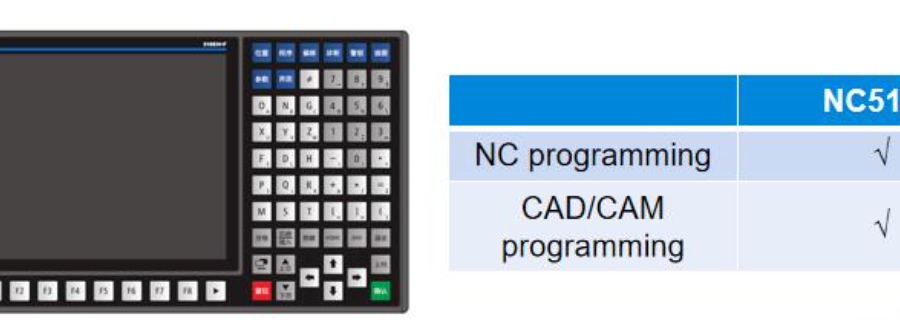
- 功能
- 位置伺服,模拟伺服,功率伺服,加速度伺服
- 驱动元件类型
- 机电,液压,气动
- 控制方式
- 半闭,开环,闭环
数控系统在刀具磨床:精细、高效、创新的行业利器在现代工业制造领域,数控系统在刀具磨床的应用已成为行业发展的重要推动力。我们的数控系统在刀具磨床领域展现出了***的性能和前所未有的精细度,为各类刀具的精密磨削提供了强大支持。数控系统的引入,使得刀具磨床的加工精度和效率大幅提升。通过精确的数值控制,我们能够确保每一次磨削的深度、角度和速度都达到比较好,从而生产出品质***的刀具产品。这不仅提高了生产效率,更大幅提升了产品质量,为客户创造了更大的价值。此外,我们的数控系统还具备强大的兼容性和可扩展性,能够轻松适应各种不同类型的刀具磨床,满足不同客户的个性化需求。通过持续的技术创新和优化,我们的数控系统已成为刀具磨床行业的**,**着行业的技术进步。选择我们的数控系统,就是选择了精细、高效和创新的工业制造解决方案。我们的数控系统在刀具磨床领域**着行业的比较高水平,是您提升生产效率、保证产品质量的比较好选择。五轴数控义齿机系统。淮安木工数控系统调试
伺服技术在数控系统中的发展:伺服装置是数控系统的关键组成部分。20世纪50年代初,数控铣床进给驱动采用液压驱动,因其力大、惯性小、反应快。但70年代初,受石油危机等影响,液压伺服逐渐被电气伺服取代。电伺服初期为模拟控制,存在噪声大、漂移大等问题。随着微处理器引入,数字控制成为主流,它具有无温漂、精度高、可参数设定等优点。现代数控系统中,交流驱动取代直流驱动、数字控制取代模拟控制是伺服技术的重大突破。90年代,直线电动机的研制成功,使数控系统可获得更高速度和刚性。苏州碳纤维数控系统调试南通丝网印刷数控系统维修。
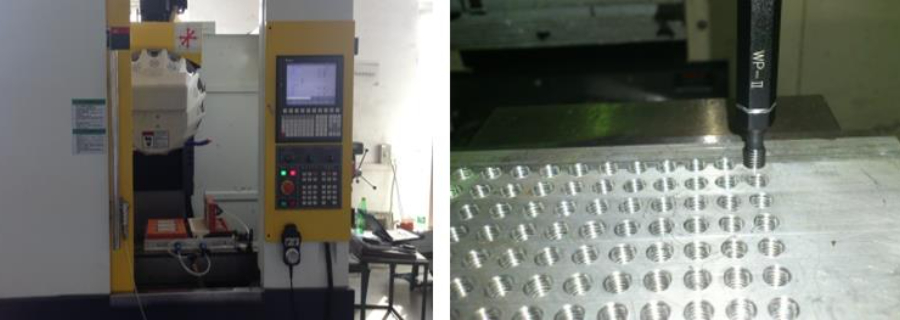
数控系统在刀具制造磨床的应用刀具性能直接影响机械加工效率与质量,数控系统在刀具制造磨床中扮演着中心角色。磨削硬质合金刀具时,数控系统精确调控砂轮修整与磨削参数,刃口锋利度高且一致性好,刀具耐用度提升30%。加工复杂成型刀具,多轴联动数控磨床可精细复刻刀具轮廓,满足不同加工需求。此外,数控系统能依据刀具材质、加工工艺自动优化磨削流程,减少废品率。配合自动化上下料装置,实现刀具规模化、高效生产,为机械加工行业提供质量刀具保障。
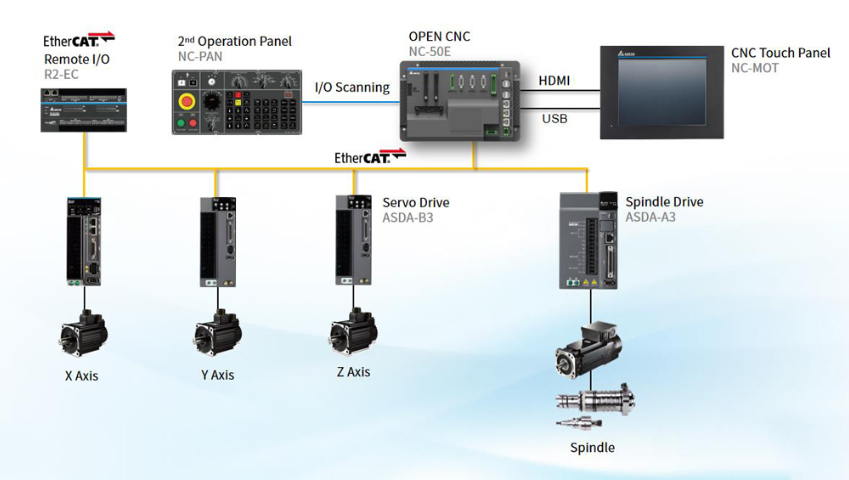
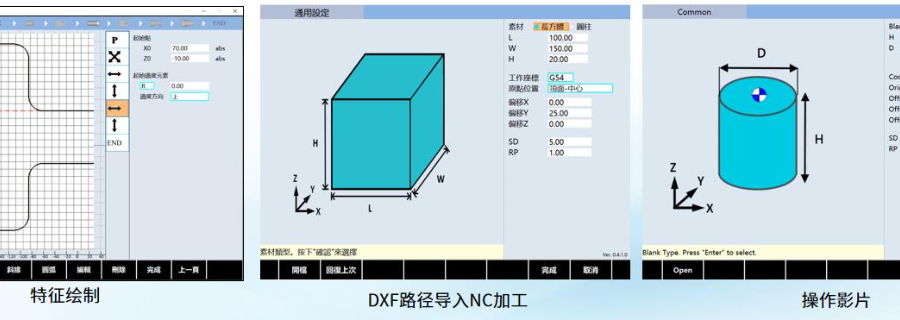
台达NC5数控系统在精密制造领域表现优越,拥有诸多特点。其运算性能大幅提升,采用新一代高运算力CPU与IEEE64位元浮点数,较前代性能提升7-8倍,能快速精细处理复杂加工数据,满足超精加工需求。具备细腻路径解析与预读设计,优化加工轨迹与速度规划,在支持ISO标准G码基础上,结合高次曲线分析拟合,实现精细路径优化,提高整体加工速度。同时,内置背隙、摩擦力等补偿能力,修正机构微缺点,保障加工精度。多通道控制功能强大,可同时控制较多4通道、32伺服轴与8主轴,单一通道支持16轴伺服驱动器,实现多程序同时加工、多工位工艺,一台控制器就能完成机械加工与机械手臂上下料,节省设备、人力与时间成本。在五轴加工方面,搭载RTCP刀尖动态补偿技术,保持刀具比较好切削状态,避免干涉,一次装夹完成五面加工,提升加工品质与效率。系统还内置先进CAD/CAM软件,集成建模、设计与加工功能,可创建复杂模型并自动生成刀具路径,提高生产效率与产品质量。此外,支持设备联网,通过VNC与FTP协议,可用移动装置远程操控或传输档案,还提供API函数库,便于对接智能产线平台。数控系统在玻璃挖缺机的应用。

数控系统是现代制造业的为主控制单元,对生产具有多维度的关键作用。在效率提升方面,它通过精确的程序指令替代人工操作,实现连续自动化加工,大幅减少停机换刀、参数调整的时间,单台设备生产效率可提升30%-50%,尤其适合批量生产。精度控制上,数控系统能将加工误差控制在微米级,解决了传统机床依赖人工经验导致的精度波动问题,保障了复杂零件(如航空发动机叶片)的一致性。柔性生产层面,通过修改程序即可快速切换加工品种,无需大规模调整设备,适应了当前小批量、多品种的市场需求,缩短产品迭代周期。此外,数控系统集成的数据采集功能,为生产过程的实时监控、故障预警和产能优化提供了数据支持,推动制造业向智能化转型。其应用直接提升了生产的质量稳定性、效率和市场响应速度。五轴数控刀具磨床数控系统。南京镁铝合金数控系统维修
数控系统在仿形机的应用。淮安木工数控系统调试
数控系统助力眼镜制造磨床升级眼镜制造对镜片磨边精度要求高,数控系统促使眼镜制造磨床***升级。数控磨床依据镜片***参数,精细控制磨边机砂轮运动,实现镜片与镜框的完美适配,装配误差小于0.1mm,提升佩戴舒适度。同时,可快速切换不同镜片材质与形状的加工模式,适应市场多样化需求。对于操作人员的要求,很大的降低,更柔性化,自动化上下料功能搭配数控系统,提高生产效率,降低人工成本,推动眼镜制造业向智能化、高效化迈进。淮安木工数控系统调试
数控系统在轮胎行业的***应用与未来展望在轮胎制造领域,数控系统正以其高精度、高效率的特性,**着行业的技术革新。数控系统在轮胎生产中的应用,不仅提升了产品质量,更实现了生产过程的智能化与自动化。数控技术的引入,使得轮胎生产过程中的各项参数得以精细控制。从原材料的混合比例到成型过程的温度、压力,再到**终的硫化时间,每一个环节都在数控系统的精确把控下,确保了轮胎成品的一致性与可靠性。此外,数控系统在轮胎行业的运用还体现在生产线的优化上。通过实时数据收集与分析,数控系统能够智能调整生产节奏,实现生产资源的比较好配置。这不仅提高了生产效率,还降低了能耗与材料浪费,为企业带来了***的经济效益。展望...
- 无锡曲面印刷数控系统 2026-04-04
- 盐城玻璃加工数控系统维修 2026-04-04
- 苏州复合材料数控系统调试 2026-04-04
- 连云港铣床数控系统定制开发 2026-04-04
- 江苏复合材料数控系统调试 2026-04-04
- 曲面印刷数控系统开发 2026-04-04
- 南通涂胶数控系统开发 2026-04-04
- 淮安石墨数控系统维修 2026-04-04
- 南通数控系统调试 2026-04-04
- 玻璃加工数控系统开发 2026-04-04

- 常州铝型材数控系统 2026-04-04
- 无锡非标自动化数控系统定制开发 2026-04-04
- 扬州石墨数控系统定制开发 2026-04-04
- 铣床数控系统定制 2026-04-04
- 泰州义齿数控系统维修 2026-04-04
- 苏州曲面印刷数控系统编程 2026-04-04



- 江苏复合材料数控系统调试 04-04
- 曲面印刷数控系统开发 04-04
- 南通涂胶数控系统开发 04-04
- 淮安石墨数控系统维修 04-04
- 南通数控系统调试 04-04
- 玻璃加工数控系统开发 04-04
- 宿迁铣床数控系统厂家 04-04
- 无锡义齿数控系统 04-04
- 盐城非标自动化数控系统编程 04-04
- 江苏曲面印刷数控系统定制 04-04