- 品牌
- VIA 威盛
- 型号
- Mobile 360
为确保防撞系统持续可靠运行,需建立完善的自诊断体系。每日启动时自动执行传感器标定检查,通过参考目标物验证测距精度。运行期间持续监测各模块工作温度、电压波动、数据刷新率等健康指标。当镜头污染度影响识别时,可以通过前置驾驶舱显示屏直观看到,从而提醒到人员进行擦拭;雷达天线出现性能衰减时,建议专业校准。所有异常事件记录精确时间戳与工况数据,为故障分析提供完整上下文。这种自我维护能力大幅提升了系统的可用性与使用寿命。杜绝碰撞隐患,芯辉让车间更安全。杭州内燃叉车安全点检系统

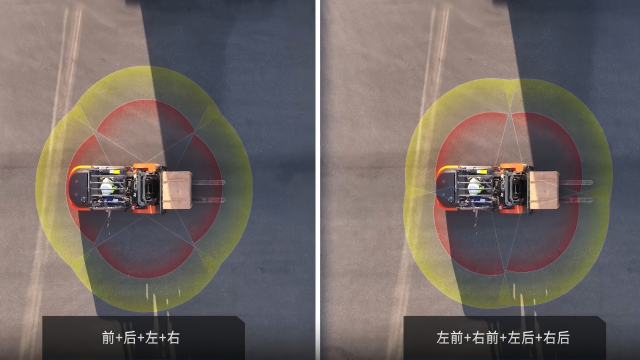
仓库与物流中心是系统的重要应用场景之一,此类场景通道狭窄、货架密集、货物周转频繁,叉车盲区风险突出,且夜间作业、低光照环境进一步加剧安全隐患。系统凭借红外补光技术及高高精度AI算法,在低光照环境下仍能保持稳定的人员与障碍物识别能力,通过三色防撞监控与声光预警,帮助驾驶员在狭窄通道内高精度控制车距。云端管理功能可统计叉车 idle 时间、运行轨迹等数据,为优化仓库动线、提升周转效率提供数据支持。港口码头及矿区堆场场景中,叉车需应对户外复杂环境、大型货物搬运及高频次作业需求,对系统的环境适应性与稳定性要求很高。系统IP67级防护、宽温工作范围及抗振动设计,可耐受港口潮湿海风、矿区粉尘及高低温交替环境。扩展的三组人员侦测摄像头能覆盖叉车作业的主要危险区域,配合4G模块与GPS定位功能,管理人员可实时掌握叉车位置及作业状态,对异常事件快速响应,保障户外开阔场景下的人车安全。浙江场域叉车安全运维系统生鲜冷链怕延误,芯辉防撞保速度。
汽车制造行业中,叉车承担零部件转运、车身装配辅助、成品车移库等作业,场景特点为零部件种类繁杂、装配线旁人员密集、大型工装设备多、作业动线交叉复杂,易因叉车盲区碰撞零部件或作业人员。系统针对该场景升级多目标识别算法,可高精度区分人员、车身部件、工装夹具等不同目标,避免对零部件的误报干扰。扩展三组摄像头覆盖300°视野,弥补叉车搬运大型零部件时的视线遮挡问题,在装配线旁、零部件货架区设置多级预警阈值,触发时先声光提醒,未避让则自动控速。DMS模块与汽车工厂MES系统联动,针对允许指定驾驶员操作对应区域叉车,同时记录叉车作业轨迹与预警事件,助力优化零部件转运动线,减少对装配线生产节奏的干扰,保障车间高效安全运转。
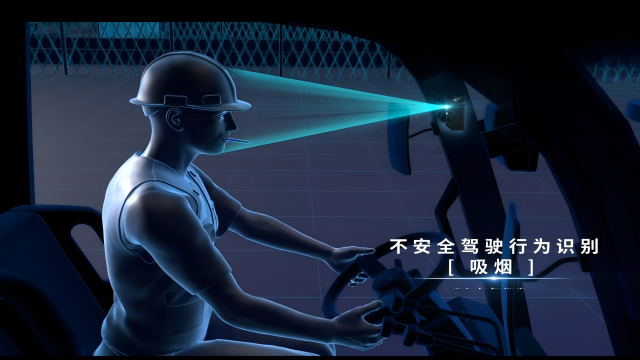
场域安全运维正在向预测性模式转型,将事故发生前的危险因素提前判断,及时预警提醒。通过建立包含场地布局、设备参数、作业流程的数字孿生模型,系统可模拟不同调度策略下的风险演化。机器学习算法分析历史近距事件数据,识别易发碰撞的工况组合(如高位取货同时转向倒车),提前生成风险提示。疲劳检测模块通过操作行为模式分析,在驾驶员注意力下降前建议休息。维护预测模型根据传感器性能衰减曲线,提前安排校准保养。这种预测性防护将安全管理的关口前移至风险形成阶段。建材仓库货物沉,芯辉防撞不损身。

在港口码头作业场景中,叉车需在集装箱堆存区、岸线装卸区、堆场通道等区域高频穿梭,面临海风盐雾侵蚀、昼夜连续作业、人车货交叉密集、多设备协同复杂等多重挑战,碰撞隐患与设备损耗风险突出。系统凭借强化型工业设计与场景化功能适配,成为港口安全作业的重要支撑。硬件层面,IP67级防尘防水与抗腐蚀处理,可有效抵御潮湿海风与盐雾侵蚀,宽温运行能力适配港口昼夜温差变化,抗振动结构能应对堆场颠簸路况,保障设备长期稳定运转。功能上,升级三组高清摄像头与毫米波雷达融合方案,实现360°无死角环境建模,高精度识别5-8米范围内的行人、场桥轨道、集装箱棱角等目标,触发三级预警机制,从声光提醒、动力限制到紧急刹停逐步干预,杜绝盲区碰撞。叉车防撞找芯辉,安全方案马上配。合肥上市公司叉车安全司机监控设备
工厂安全选芯辉,生产效益节节升。杭州内燃叉车安全点检系统
为满足叉车安全防护的实时性要求,系统采用边缘计算架构。所有传感器数据在车载工控机内完成处理,典型场景响应延迟控制在毫秒内。嵌入式AI芯片运行轻量化神经网络,每秒可处理大量图像。边缘节点同时缓存运行数据,在网络中断时仍能保持全功能运行。通过容器化部署,安全算法可单独于车载系统进行在线升级。这种分布式架构既保证了重要安全功能的实时可靠,又为功能迭代提供了灵活性。系统根据不断收集的警示信息图片进行学习,随着产品的使用,丰富更多厂区实际使用场景,促使设备在识别过程更完善,识别精度更准确。杭州内燃叉车安全点检系统

- 长沙钢铁厂叉车安全管理系统供应商 2026-02-24
- 上市公司叉车安全AI防撞系统 2026-02-24
- 舟山工厂叉车安全管理系统供应商 2026-02-24
- 合肥天车矿车叉车安全防撞系统市场价格 2026-02-24
- 浙江燃油叉车安全管理系统供应商 2026-02-24
- 安徽钢铁厂叉车安全防撞系统市场价格 2026-02-24
- 上海铸造厂叉车安全语音警示系统 2026-02-24
- 广州内燃叉车安全监控系统服务商 2026-02-24