- 品牌
- VIA 威盛
- 型号
- Mobile 360
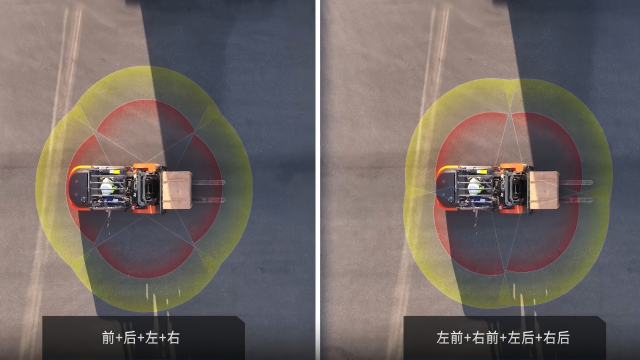
厂区仓库场景中,叉车常穿梭于狭窄通道、密集货架及货流周转区,面临人员与叉车动线交叉、货物遮挡视线、夜间低光照、临时堆货挤占通道等多重安全隐患,易引发人员碰撞、货架倾倒、货物损毁等事故,影响生产周转效率。系统针对该场景特性高精度适配,构建全维度安全防护体系。硬件上,重要设备及摄像头均采用IP67级防水防尘设计,可耐受仓库内粉尘、潮湿环境,红外补光功能搭配7英寸高清显示屏,确保货架阴影区、夜间作业时仍能清晰识别目标,避免因视线受阻引发风险。功能层面,标配前后双摄像头覆盖190°视野,可高精度侦测4-5米内的作业人员、堆货边缘及货架立柱,支持自定义双区预警,触发时通过声光警报同步显示屏标注,提醒驾驶员及时避让。叉车防撞找芯辉,安全方案马上配。广州叉车安全管理系统供应商

AI叉车防撞系统是面向工厂、仓库、港口码头等货运场景的AI视觉安全解决方案,以主动预警为重要,致力于提升叉车驾驶安全、防范人车及车物碰撞事故,降低企业运营中断、保险及法律相关成本。该系统采用软硬件一体化设计,搭配云端管理功能,兼顾实时风险预警与车队长期管理需求,无需人员佩戴额外传感器即可实现高精度侦测,适配主流燃油及电动叉车,安装流程简便且配置灵活,能快速融入各类现有作业体系。其工业级防护设计可应对粉尘、潮湿等复杂环境,为高人流、高货流的交叉作业场景构建基础安全防线。浙江上海叉车安全点检系统电商仓储高频运,芯辉 AI 防撞不误工。

叉车AI防撞系统搭载前后双行人侦测摄像头与驾驶监控摄像头,构建起多角度感知网络,有效化解工业场景中叉车作业的盲区难题。摄像头支持60°至120°侦测范围,根据安装高度可高精度覆盖4至5米内的人员区域,无论是仓库货架密集区、车间转角处,还是通道交叉路口,都能实时捕捉周边人员的移动轨迹与静态状态。系统依托先进智能算法高精度区分行人与货架、托盘等静态障碍物,从根源上避免误报干扰正常作业节奏。当人员进入预设警戒范围时,系统立即向驾驶员发出清晰声光警报,同时在车内显示器上以醒目标识标注风险位置与距离,为驾驶员提供直观且清晰的避险指引。这种多维度、无死角的感知设计,高精度填补了叉车机械结构本身带来的视野局限,让每一次转向、倒车、直行作业都能获得多角度安全保障,适配各类工业场景的基础安全需求。
为满足叉车安全防护的实时性要求,系统采用边缘计算架构。所有传感器数据在车载工控机内完成处理,典型场景响应延迟控制在毫秒内。嵌入式AI芯片运行轻量化神经网络,每秒可处理大量图像。边缘节点同时缓存运行数据,在网络中断时仍能保持全功能运行。通过容器化部署,安全算法可单独于车载系统进行在线升级。这种分布式架构既保证了重要安全功能的实时可靠,又为功能迭代提供了灵活性。系统根据不断收集的警示信息图片进行学习,随着产品的使用,丰富更多厂区实际使用场景,促使设备在识别过程更完善,识别精度更准确。车间设备价值高,芯辉防撞损减少。

系统可以深度适配港口管理需求,通过人脸识别严格核验驾驶员操作资质,从源头杜绝无证作业风险,配合DMS模块监测疲劳驾驶、使用通讯设备等违规行为,规范户外作业习惯。依托4G/GPS模块与云端平台,管理人员可实时追踪叉车位置、作业轨迹,同步收集预警记录、运行状态等数据,生成设备维保提醒与风险点位分析报表,助力优化堆场作业动线与调度方案。针对港口多设备协同场景,系统可与码头智能调度系统联动,实现叉车与场桥、水平运输设备的安全避让与高效配合,既降低事故导致的巨额损失,又通过数据化管理推动港口作业从“事后处置”向“事前预防、事中管控”转型,兼顾安全防护与运营效率提升。从安装到维护,叉车防撞我们全负责!杭州仓库叉车安全解决方案
汽车工厂零部件运输,芯辉防撞零失误。广州叉车安全管理系统供应商
系统配套的移动APP为叉车安全管理提供了便捷高效的操作渠道,实现参数配置、设备运维与数据管理的全流程智能化升级。管理人员通过手机APP即可灵活校准三个摄像头的侦测范围与预警灵敏度,支持根据作业场景需求设定单一危险区域,或划分双重警告/危险区域,适配仓库密集货架区、车间宽通道、港口装卸区等不同场景的安全标准。同时,APP内置韧体在线升级功能,无需拆卸设备即可完成系统版本更新,同步具备影像实时查看、历史记录下载功能,可远程调取储存在Micro SD卡中的行车影像与报警日志,无需现场值守即可完成设备维护与数据提取。这种移动端远程操控设计,彻底打破了传统设备管理的空间限制,让安全参数调整、设备状态监测、数据溯源更加高效,大幅降低了企业安全管理的人力与时间成本。广州叉车安全管理系统供应商
- 长沙钢铁厂叉车安全管理系统供应商 2026-02-24
- 上市公司叉车安全AI防撞系统 2026-02-24
- 舟山工厂叉车安全管理系统供应商 2026-02-24
- 合肥天车矿车叉车安全防撞系统市场价格 2026-02-24
- 浙江燃油叉车安全管理系统供应商 2026-02-24
- 安徽钢铁厂叉车安全防撞系统市场价格 2026-02-24
- 上海铸造厂叉车安全语音警示系统 2026-02-24
- 广州内燃叉车安全监控系统服务商 2026-02-24