工程车作业范围大,驾驶员视觉盲区大,且现场噪音易导致其注意力分散、判断力降低,作业危险系数高,如何防患于未然、降低风险是主管部门的探索方向。由于工程车作业人员 95% 以上的环境和车辆状态信息通过视觉感知,因此解决工程车辆等安全问题、降低作业风险,应从提升视觉感知入手。佳兴伟诚工程车辆盲区防碰撞预警系统,基于视觉算法,专为工程车、渣土车等重型车辆设计。它通过 360 全景盲区预警系统、车载 AI 视觉摄像头、车内显示器、声光报警器,对靠近的行人、非机动车进行图像采集、智能识别和预警提示。当系统监测到车辆右侧有其他工程车辆或作业人员进入作业范围,车内显示器会立即放大右侧画面,辅助驾驶员提升视觉感知;若距离超过阈值,扬声器会触发声光预警。此外,随着车联网技术发展,除该系统外,还可通过异常驾驶行为监测预警、前方碰撞预警、车道偏离预警、紧急制动等系统,实现风险预知和主动干预,进一步保障工程车作业安全。工程车防碰撞预警系统借助5G通信技术,实现了实时的数据传输,让预警信息能够实时传达给司机。临夏消防车防碰撞预警电话

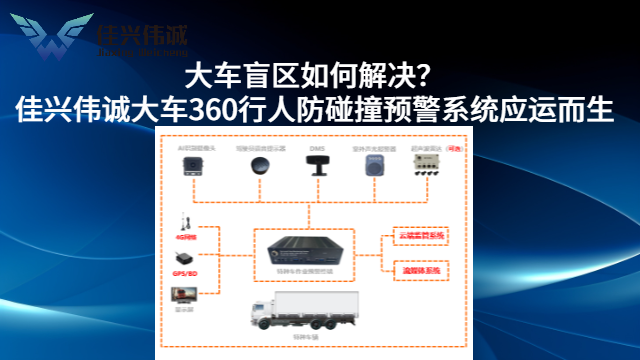
装载机、铲车、挖机等工程机械体型庞大,易产生视觉盲区。在光线差、噪声大的恶劣环境中,后视镜作用有限。尤其在水泥厂、混凝土公司,装载机露天作业,厂区粉尘多、噪音大、人多车多、人车交互密集;矿山厂区环境更差,昼夜温差大、矿尘多,视线受阻,加之其他工程机械多,装载机盲区复杂,易发生碾压事故,因此安装车辆防碰撞预警系统很有必要。随着 AI 视觉技术发展,佳兴伟诚科技将其融入 360 全景作业监控,实现 360 度工程车作业半径内人员智能识别,可做到 6 路 AI 视觉盲区检测。该系统搭配行人侦测摄像头,运用 AI 算法实时智能侦测车身周边及旋转半径内的作业人员,一旦侦测到,立即向司机发出警告,避免因视觉盲区引发意外,且无需额外摄像头。此系统可实现车外声光警报、车内蜂鸣器 + 语音播报功能,通过自有算法,结合全景 AI 影像(360)和盲区检测(BSD),形成车辆 360 度无死角的作业半径安全辅助系统,还支持四路 360 环视 + 额外两路摄像头接入,满足多种车载监控需求。长沙装载车盲区防碰撞预警定制设计矿山车辆前向防碰撞预警系统,实时监测车前障碍物并在存在碰撞风险时及时向驾驶员发出预警。

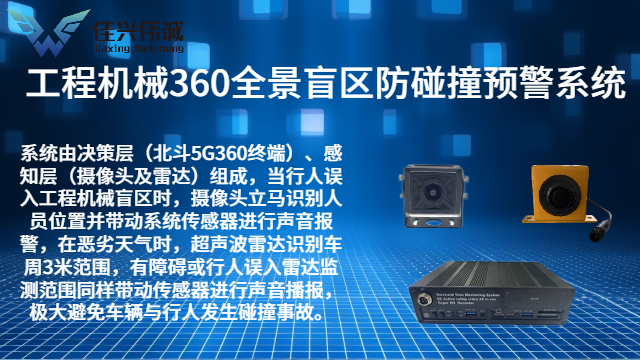
环卫车在城市道路上作业,清扫、清运时常常需要停靠路边,周围行人、非机动车穿梭,环境复杂。佳兴伟诚的环卫车防碰撞预警系统,为环卫工的安全保驾护航。系统在环卫车的清扫装置两侧、车尾及驾驶室侧方安装传感器,能监测 3 米至 10 米范围内的目标。当有行人靠近正在作业的清扫装置,系统会发出 “作业区域有行人,请注意” 的语音预警;当环卫车停靠路边准备清运垃圾时,若有非机动车从后方驶来,车尾的雷达会及时探测到,驾驶室内的报警灯亮起,同时语音提醒 “后方有车辆靠近,注意开门安全”。该系统还具备夜间模式,在光线不足时仍能快速识别目标,让环卫作业全天候安全无忧。
油罐车运输的是易燃易爆危险品,一旦发生碰撞,后果不堪设想。佳兴伟诚的油罐车防碰撞预警系统在车头、车尾及罐体两侧安装高精度雷达,能探测 100 米范围内的目标,结合油罐车的速度计算碰撞风险。当与前车距离过近,系统会发出 “保持安全距离,防止追尾” 的一级预警;当有车辆从侧方逼近,会触发二级预警,除了声光报警,还会通过车载系统向车队管理中心发送预警信息。系统还具备泄漏监测联动功能,当检测到可能的碰撞导致罐体异常,会立即提醒司机停车检查。该系统的防爆设计符合危险品运输标准,为油罐车运输筑起一道坚不可摧的安全防线。搭载毫米波雷达的工程车防碰撞预警系统,能快速扫描周围障碍物,及时发出警报,避免碰撞事故发生。

工程车的 “视线死角” 成因复杂,或因车身结构遮挡,如混凝土搅拌车的旋转筒挡住右侧 3-5 米范围;或因作业环境复杂,像矿山工地的粉尘会让能见度降至 5 米以下。佳兴伟诚盲区防碰撞预警系统凭借先进技术,成为解决问题的关键。其搭载的激光雷达扫描频率达 10Hz,可测量 0.3-10 米内障碍物距离,误差不超过 5 厘米;配合红外摄像头,在夜间无光环境中也能清晰成像,识别行人准确率达 95%。数据经车载芯片 0.1 秒快速处理后,以彩色标注的方式在显示屏呈现,让原本的 “盲区” 变得透明可见,技术实力为安全保驾护航。佳兴伟诚科技为工程车防碰撞预警系统提供的售后服务,让客户无后顾之忧。昌吉矿卡前向防碰撞预警电话
在矿山作业中,佳兴伟诚科技的工程车防碰撞预警系统有效减少了车辆间的碰撞事故,保障生产安全。临夏消防车防碰撞预警电话
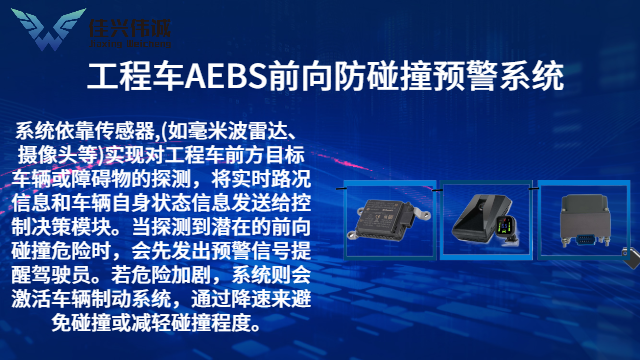
在矿山作业中,车辆运输对生产流程顺畅至关重要,但矿山路况复杂、车辆多,且灰尘多、视线差,车辆碰撞事故风险高。为此,佳兴伟诚推出矿山车辆前后防碰撞预警系统,为矿山运输安全提供可靠技术保障。该系统采用先进的传感器融合技术,集成毫米波雷达与高精度传感器。毫米波雷达能全天候工作,不受恶劣天气和光线影响,准确测量车辆前后方障碍物或其他车辆的距离、速度和角度;摄像头通过图像识别对监测区域物体分类识别。再经传感器融合算法深度融合两者数据,实现对车辆周边环境的准确感知。同时,系统运用深度学习和人工智能算法,实时分析传感器数据。通过学习大量矿山场景数据,识别不同危险情况并分级;还能计算本车与前后方目标的相对运动趋势,预测碰撞风险,提前为驾驶员提供预警。临夏消防车防碰撞预警电话