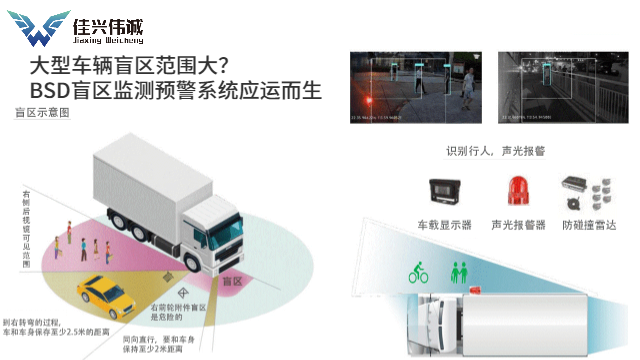
重型载货卡车在城市物流配送时,车长超 12 米,转弯时的内轮差盲区易卷入行人和非机动车。佳兴伟诚的卡车 360 全景盲区监测预警系统,在车头保险杠、驾驶室两侧及车尾安装高清摄像头,配合沿车身分布的超声波雷达。当卡车右转时,雷达扫描右侧 5 米内的移动目标,摄像头实时拼接右侧盲区画面,若有骑行者进入内轮差范围,系统立即用红色框标记并发出急促警报,同时驾驶室内对应方向的震动提示器启动。即使在雨天或夜间,摄像头的夜视功能和雷达的穿透性仍能识别,让驾驶员及时减速避让,大幅降低城市配送中的转弯事故率。佳兴伟诚工程车作业区域360全景AI预警系统可自动识别作业区域内的行人、车辆等目标,为工程作业安全把关。北京工程车盲区360全景
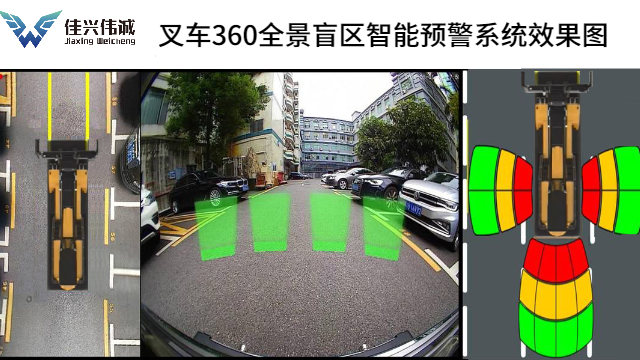
叉车作业环境多为仓储库房、工厂车间等场景,货物堆放密集、人车混流频繁,盲区极易引发碰撞事故,360 度全景盲区无死角可视化预警辅助系统成为保障作业安全的关键装备。该系统在叉车车身四周安装 4 - 6 个高清超广角摄像头,实时捕捉货叉、车身两侧及后方的环境影像,通过 AI 图像拼接技术,将多路画面合成为无缝的 360 度全景鸟瞰图,清晰呈现在驾驶室内的显示屏上,让驾驶员无需频繁转头,即可掌握车身周围及货叉作业区域的细节。系统搭载智能识别算法,能区分行人、货架、其他设备等物体,当检测到人员进入货叉周边 7米的危险范围,或叉车转向、倒车时遇障碍物,会立即触发多级预警:驾驶室内发出语音提示与灯光闪烁,货叉附近的声光报警器同步发出警示,提醒周围人员远离。针对叉车作业中常见的低光照、粉尘多等环境,系统配备红外补光与抗干扰镜头,确保画面清晰稳定,即使在仓库角落或夜间作业,盲区风险也能被实时监测。大同北斗5G360全景找哪家当盲区内有物体快速靠近,360 全景盲区驾驶辅助系统会以声音和图像双重方式提醒驾驶员。

在矿山、基建等复杂作业场景中,推土机的视觉盲区始终是安全事故的高发隐患。佳兴伟诚推出的 360 全景盲区预警系统,通过融合多项智能技术,为重型机械装上 “智慧双眼”,彻底打破传统操作的视野局限。该系统搭载 6 路高清夜视摄像头,可覆盖机械周围 5 米范围,实时合成无畸变的 360 度全景影像。驾驶室内的 10.1 英寸触控屏能动态显示周围环境,配合 AI 智能算法,当检测到人员、车辆或障碍物进入危险区域时,会立即触发声光报警,并在屏幕上高亮标注风险位置,响应延迟低于 0.3 秒。针对恶劣工况,系统采用 IP6K9K 级防护设计,-40℃至 85℃的宽温运行能力确保在暴雨、粉尘、高温等环境下稳定工作。内置的毫米波雷达与视觉系统形成双重监测,即使在摄像头被遮挡的情况下,仍能识别移动目标,实现 “视觉 + 雷达” 的冗余安全保障。
佳兴伟诚的车辆 360 全景系统,宛如为车辆配备了无死角的的 “电子眼”。系统在车辆前后左右巧妙安置四个高清广角摄像头,这些摄像头如同忠诚卫士,时刻紧密监控车辆周边环境。当车辆启动瞬间,摄像头迅速开始工作,捕捉到的图像信息被飞速传输至系统的处理单元。处理单元恰似一位技艺精湛的大师,运用先进算法,对这些图像进行无缝拼接与矫正。接着,一幅清晰、完整的车辆四周 360 度全景画面便在车内显示屏上完美呈现,让驾驶员仿佛拥有 “上帝视角”,对车辆周围情况了如指掌。360全景驾驶辅助系统支持在中控屏幕上切换不同视角,满足驾驶员在不同场景下对盲区观察的需求。
叉装车(Telehandler)以其举升高度和灵活性应用于物流、建筑、农业,但其举升后的视野盲区及稳定性风险尤为突出。佳兴伟诚360全景驾驶辅助系统,为这类多功能设备提供前所未有的“立体安全视野”。系统摄像头不覆盖车身底盘四周(监控行驶路径障碍),更关键是在伸缩臂关键节点(如驾驶室上方、臂架中段)设置,通过佳兴伟诚创新的多源视图融合技术,在驾驶室屏幕同时呈现360度地面全景视图和关键的高空臂架工作区域视图(如货叉载物状态、与上方障碍物间隙)。操作手在举升、伸缩、搬运物料时,能同时清晰掌握地面人员设备位置、高空障碍物(管线、屋檐)、货叉与目标点的距离以及车身支腿状态(防倾翻)。系统可设置工作区域安全预警,当人员进入危险区域自动提醒。在仓库巷道穿行、崎岖工地搬运、高空设备安装等场景下,佳兴伟诚系统是预防碰撞、碾压、倾翻、高空坠物事故的安全装置,提升复杂作业环境下的操作信心与效率。货车360 全景驾驶辅助系统为物流货车保驾护航,减少运输过程中的盲区事故。邢台360全景设计
工程车360 全景驾驶辅助系统的操作极为简便,驾驶员能快速上手,无需复杂学习。北京工程车盲区360全景
特种车辆360全景盲区监测预警系统的用户是驾驶员/操作员,其设计必须深刻理解并优化人机交互(HMI),在提升安全性的同时避免增加认知负荷。显示设备——全景显示屏的选型与布置至关重要。屏幕需具备高亮度、高对比度和广视角,确保在强光直射下图像清晰可辨;防眩光处理能减少反射干扰;尺寸适中,位置应位于驾驶员自然视线范围内(如仪表台中部或A柱附近),便于快速扫视,无需大幅转头或低头。显示界面设计需简洁直观:全景视图应真实无畸变,关键区域(如盲区报警位置)的高亮或闪烁提示需醒目但不过于刺眼;障碍物图标标识清晰;必要时可提供分屏视图(如前视+后视)。报警音效设计需科学:不同级别的报警应有明显差异化的音调、节奏和音量,定向声音报警能加速驾驶员定位风险源;语音报警(如“左侧行人靠近!”)信息明确,但需避免在嘈杂环境中过度使用。报警逻辑需智能,避免在低速、安全移库或已知有指挥员在场时产生过多干扰性误报。好的人因工程设计,能让系统成为操作员得力的“安全助手”,而非令人分心的“干扰源”,确保安全增益变大化。北京工程车盲区360全景