
通过外场对比试验,该雷达样机风场观测结果与定标设备对比误差小于0.5m/s。为进一步测试雷达观测性能和环境适应性,团队利用该雷达在宿州市高铁站实地测量了高速列车尾流中的风场结构。雷达在无人值守下连续稳定工作超过100小时,获得了3米和0.1秒高时空分辨率下的350km/h的高铁尾流连续观测,并利用激...
激光雷达基本参数
- 品牌
- 慧视科技
- 型号
- 可定制
激光雷达企业商机
你可以看到哪里可能发生事故。激光雷达还可以通过减少空转车辆的数量来减少污染,从而提高城市的可持续性。了解周围环境的车辆还可以通过超速行驶等行动减少其碳足迹,这是一种节省燃料的特定驾驶技术(或者,对于电动汽车,电池寿命)。例如,可以实时了解其环境的卡车较少依赖硬制动或硬加速。因此,节省燃料。随着车辆自动化的发展,环境影响也在不断发展我们距离大量自动驾驶汽车、送货机器人或与道路使用者和其他城市基础设施无缝通信的完全连接的智能城市还有很长的路要走。但它来了,激光雷达在确保我们成功安全到达那里方面发挥着关键作用。成都慧视光电推出的雷视一体机可应用于电力巡线。西藏轨道检测激光雷达测距
激光雷达
在夜间视野较差时,激光雷达依旧是更佳的解决方案。夜间场景下,摄像头与人眼只能依赖车辆灯光和周围环境光,但是这会有很多视觉盲区。而激光雷达则能让这个问题迎刃而解,即便在昏暗环境下,也能提供丰富的感知信息。虽然激光雷达优势众多,但也并不是全能的,譬如雨雾等极端环境下的穿透效果始终不及毫米波雷达。我们要清晰的认识到,激光雷达是L3级别自动驾驶的关键传感器之一。只有将多个多类传感器获取的数据、信息集中在一起综合分析,让不同传感器在识别能力、抗恶劣和暗光环境、探测距离等不同方面的优势相互补充,才能更好地提高汽车的感知精度和系统决策的正确性。此外,虽然各大厂商都在积极布局激光雷达的应用,但是相对于毫米波雷达而言它的价格更昂贵,随之带来的就是成本增加,这也是众多车企弃之不用、犹豫的一大原因。综合来看,激光雷达仍然是自动驾驶的比较好解,通过多种传感器的共同作用,自动驾驶将有着一个光明的未来。贵州固态面阵激光雷达slam激光雷达在货车装箱的应用。

在物体测量领域,激光雷达能够通过扫描获取物体的三维信息,从而计算出体积、重量等数据。在大多数高速入口,都会对进入高速的货车等进行称重,此时,激光雷达就有大用场,将激光雷达植入车辆检测系统,就能够对进入的车辆进行计数和安全检测,可以实时检测来往车辆的长宽高,并且能够根据算法计算出体积、重量,一旦车辆有超高、超宽、超长、超重等行为,就会发出警报制止其上高速。在安防领域,激光雷达能够实现目标区域的异物入侵监测。例如在火车站站台,需要乘客远离轨道1米以上,但是许多乘客容易疏忽大意,就容易出现危险,将激光雷达安装在车站月台,就能够辅助进行安全距离的报警监测。
点云还可用于土方计算高精度激光点云,可用于构建地形三维模型,为勘察设计提供断面量测、坡度坡向量测、土方填挖量等信息,极大地减少工程勘察设计中的外业工作量,缩短工作周期。此外,点云还可用于监测地质灾害通过地形三维模型的建立,可以大面积监测地形的变化,可以根据地形的变化方向及地形的变化量,作出风险评估,为预防地质灾害的发生提供依据。例如,对滑坡体地表的监测,特别是在陡坡下的道路、铁轨,以及削坡建房等容易发生滑坡地区,能够为滑坡体成因和发育趋势的推断提供重要依据。上述五个方面,只是点云数据应用的其中一部分。因为激光雷达具备着以下几个特点:全天候工作,主动获取数据;隐蔽性好,抗有源干扰能力强,且获取数据范围广;激光穿透能力强;外业工作量小;点云精度高,空间坐标信息准确。所以,激光雷达(LiDAR)获取的点云数据,往往也适用资源勘探、城市规划、农业开发、水利工程、环境监测、矿山测量、隧道测量、公路道路测量、电缆监测、海洋深水测量等各个方面。慧视光电的三维激光雷达精度高,价格优惠。

激光雷达有助于自适应巡航控制、盲点监控、车道保持、紧急制动和行人检测等功能活动。但是,与任何技术一样,激光雷达也在不断发展。激光雷达创建智能响应交通流激光雷达不仅可以帮助车辆实时感受和体验道路,还可以帮助车辆与交通监控等其他基础设施之间的通信。具体来说,基于激光雷达的交通监控可以实时识别接近红绿灯的行人、自行车和其他道路使用者。极重要的是,它可以测量不同车道和红绿灯处的汽车速度和数量。有了这些数据,监控软件可以改变交通灯间隔,以减少行人等待时间并改善整体交通流量。我们走一个糟糕的十字路口。让车辆移动也是为了安全,因为当你追踪擦肩而过的物体时,软件会确切地知道这辆车是否在1秒、5秒或10秒内超过了这辆车。慧视光电生产的三维激光雷达具有探测范围宽、分辨率高、响应速度快、点云密集、环境耐受性高等优点。昆明面阵激光雷达传感器
激光雷达以激光作为载波.可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。西藏轨道检测激光雷达测距
激光雷达(LiDAR)点云数据,每一个点都包含了三维坐标信息,也是我们常说的X、Y、Z三个元素,有时还包含颜色信息、反射强度信息、回波次数信息等。首先,让我们了解一下它们是如何产生的。其实,这些点是机载激光雷达向地面发射激光信号,然后收集地面反射的激光信号而来的。此后,内业通过联合解算、偏差校正,便可以计算出这些点的准确空间信息。看上去一个简单的数据获取,其实包含了较为复杂的设备结构及数据采集过程。其一,激光雷达(LiDAR)包括了激光测距系统、光学机械扫描单元、控制记录单元、全球定位系统(GlobalPositionSystem,GPS)、惯性测量系统(InertialMeasurementUnit,IMU)以及一套成像设备等。其二,机载激光雷达(LiDAR)进行采集点云数据时除了天气需要满足飞行条件外,还需要获得空域许可,提前设计航线,实地勘察。三维预览,只是点云基本的表面特征,因为每一个点云都具备空间坐标信息,因此它们都具备测量能力。两点成线,三点成面,四点成体,通过这些点,不仅可以明确了解地表空间上的某个点的坐标信息,还可以计算它们之间的长度、面积、体积、角度等信息,正好应对了测量需要的要素。西藏轨道检测激光雷达测距
与激光雷达相关的文章
云南64线激光雷达产品
- 云南车用激光雷达技术 2024-04-18
- 西藏机载激光雷达标定 2024-04-18
- 西藏无人机激光雷达测绘 2024-04-17
- 昆明地面激光雷达测绘 2024-04-17
- 2D激光雷达商家 2024-04-17
- agv激光雷达系统 2024-04-17
- 成都轨道交通激光雷达扫描仪 2024-04-16
- 云南三维激光雷达电子狗 2024-04-16
- 重庆固态激光雷达商家 2024-04-16
- 贵州固态激光雷达企业 2024-04-16
- 四川固态激光雷达技术 2024-04-16
- 昆明一体式激光雷达产品 2024-04-15
与激光雷达相关的产品




与激光雷达相关的新闻
-
贵州mems激光雷达电机 2024-04-14 16:01:41激光雷达(LiDAR)点云数据,每一个点都包含了三维坐标信息,也是我们常说的X、Y、Z三个元素,有时还包含颜色信息、反射强度信息、回波次数信息等。首先,让我们了解一下它们是如何产生的。其实,这些点是机载激光雷达向地面发射激光信号,然后收集地面反射的激光信号而来的。此后,内业通过联合解算、偏差校正,便...
-
成都ibeo激光雷达结构 2024-04-14 21:01:45你可以看到哪里可能发生事故。激光雷达还可以通过减少空转车辆的数量来减少污染,从而提高城市的可持续性。了解周围环境的车辆还可以通过超速行驶等行动减少其碳足迹,这是一种节省燃料的特定驾驶技术(或者,对于电动汽车,电池寿命)。例如,可以实时了解其环境的卡车较少依赖硬制动或硬加速。因此,节省燃料。随着车辆自...
-
贵州大气激光雷达结构 2024-04-14 13:01:57慧视光电研发的激光雷达是一种高精度的距离、速度等物理量探测设备,其内部16组激光能够进行360°旋转,形成3D点云图,可以远距离高速实现三维环境扫描和目标探测等任务。在夏季预防自然灾害中,激光雷达具有广泛的应用,可用于水文监测、森林火灾监测、地质灾害监测、气象监测等多个方面,有助于提前预警和减轻自然...
-
云南汽车激光雷达成像 2024-04-13 19:01:52成都慧视光电的HSLi-H20VF激光雷达测量系统,是一款基于激光雷达和可视图像融合的3D测量产品。该产品基于激光雷达模块和内置高分辨率相机,可高精度,高密度,实时地生成彩色激光点云。相机模块设有变焦镜头,结合激光点云的距离信息,有利于在整个视野范围内对目标物进行变倍放大识别,提高激光雷达系统的测量...
与激光雷达相关的问题
新闻资讯
产品推荐
-
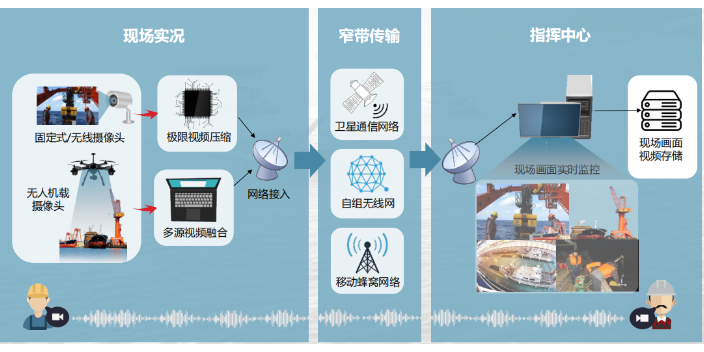
贵州窄带高清音视频视频口碑推荐
2026-02-28 -
吉林数据目标识别解决方案
2026-02-28 -

贵州行业用AI智能视觉
2026-02-28 -

吉林物流视频压缩与传输技术
2026-02-28 -
四川高效目标识别远程协助
2026-02-28 -
湖北目标识别供应商
2026-02-28 -

重庆高清视频压缩与传输专业方案
2026-02-28 -

人防图像处理板批量定制
2026-02-28 -

宁夏高效目标识别售价
2026-02-28