- 品牌
- 度风
- 型号
- 齐全
实时性:毫米波雷达能够快速获取目标的距离和速度信息,适合动态场景的监测。应用领域:交通监控:用于测速、违章监测等,能够实时获取车辆的速度和位置。无人驾驶:在自动驾驶汽车中,毫米波雷达用于环境感知,帮助车辆识别周围的障碍物和行人。工业自动化:在生产线中用于物体检测、定位和测量,提高生产效率和安全性。安防监控:用于监测特定区域内的活动,增强安全防护能力。工作原理:毫米波雷达通过发射毫米波信号并接收其反射信号来测量目标的距离和速度。具体步骤包括:航空航天:用于飞行器的距离和速度测量。昆山质量毫米波测距测速雷达费用

毫米波雷达是指工作波长介于 1-10mm 的电磁波雷达。但结合工程应用习惯,本报告将工作于 24GHz,77GHz,79GHz,95GHz 等频段的微波雷达都统称为毫米波雷达。毫米波雷达具有频段宽,容易实现窄波束,分辨率高,不易受干扰等特点。毫米波雷达是测量被测物体相对距离、相对速度、相对方位的高精度传感器,早期被应用于***领域,随着雷达技术的发展与进步,毫米波雷达传感器开始应用于汽车电子、无人机、智能交通等多个领域。 [1-2]毫米波雷达防碰撞的基本原理是利用天线发射电磁波后,对前方或后方障碍物反射的回波进行不断检测,并通过雷达信号处理器进行综合分析,计算出与前方或后方障碍物的相对速度、距离和角度,并生成警告信息传递给汽车控制电路,由汽车控制电路控制汽车变速器和制动器作出应对动作,从而避免发生碰撞。昆山质量毫米波测距测速雷达费用4D雷达点云与视觉图像对齐,解决纯视觉方案在低光照下的误判问题。

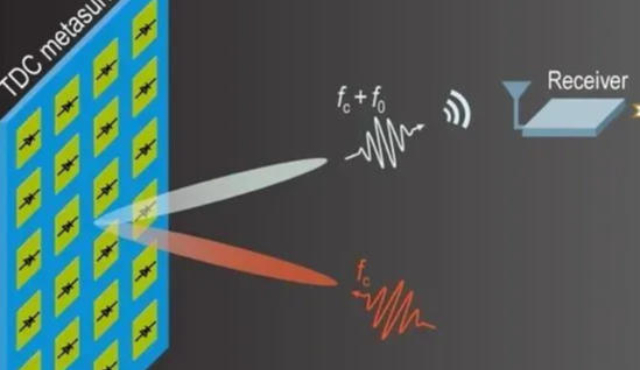
微波光子学应用***,包括通信、雷达、电子战等。而微波光子雷达作为该技术的延伸,打破了传统电子雷达在频率和带宽间的权衡。薄膜铌酸锂材料因其独特性质,成为实现高性能电光调制的理想选择。通过结合先进的光子集成材料与工艺,微波光子雷达有望在未来实现更高频率、更大带宽和更小尺寸的发展,为车载雷达、机载雷达和智能家居等领域带来变革。研究团队通过优化制备技术,成功在单一芯片上集成了倍频模块和回波去斜模块,完成了高效的毫米波雷达信号产生、处理和接收。
5、雷达测速仪发射波束的张角是一个很重要的技术指标。张角越大,测速准确率越易受影响;反之,则影响较小。6、测速雷达如果天线放置不当,当地势为非平原状态时,会使目标车的读数被其它车的速度代替。7、如果目标旁边有反射能力更强的物体存在,测速雷达也只能测到反射能力强的物体。8、当有两车并行时,雷达测速仪无法分辨出哪一辆车是超速车辆。9、当测量信号经过多次反射后,测速雷达测出的结果也会出错。10、无线电波会对测速雷达产生干扰,使测量结果失真。11、雷达感应器可以侦察到雷达测速仪却极难侦察到激光测速仪的存在。(v)为目标速度,(\lambda)为电磁波波长。77GHz毫米波系统可检测零点几毫米的移动,速度分辨率达0.1m/s。

2025年1月,从南开大学获悉,南开大学携手香港城市大学,成功研制出薄膜铌酸锂光子毫米波雷达芯片,在毫米波雷达领域取得重大突破。这一创新成果,为未来6G通信、智能驾驶、精细感知等前沿领域的应用奠定了坚实基础。 [1研究团队成员、南开大学教授朱厦说,该芯片基于兼容CMOS工艺的4英寸薄膜铌酸锂平台设计,实现了厘米级距离与速度探测分辨率,并在逆合成孔径雷达(ISAR)二维成像方面展现出***的精度,该成果1月27日发表在《自然·光子学》杂志上。这一创新成果有效突破了传统电子雷达在低频段窄带宽上的技术瓶颈,推动集成光子毫米波雷达系统在分辨率、灵活性、适用性和集成度方面迈上新台阶。雷达系统发射一定频率的毫米波信号。吴中区智能化毫米波测距测速雷达费用
不受光照影响:在夜间或恶劣天气条件下仍能正常工作。昆山质量毫米波测距测速雷达费用
美国**部从七十年代就开始研制、试验双/多基**达,较***的“圣殿”计划就是专门为研究双基**达而制定的,已完成了接收机和发射机都安装在地面上、发射机安装在飞机上而接收机安装在地面上、发射机和接收机都安装在空中平台上的试验。俄罗斯防空**已应用双基**达探测具有一定隐身能力的飞机。英国已于70年代末80年代初开始研制双基**达,主要用于预警系统。我们知道,蜻蜓的每只眼睛由许许多多个小眼组成,每个小眼都能成完整的像,这样就使得蜻蜓所看到的范围要比人眼大得多。昆山质量毫米波测距测速雷达费用
苏州度风科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在江苏省等地区的通信产品中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来度风供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!
通过四喇叭馈源形成的和波束与差波束,实时比较回波信号的幅度差或相位差,生成方位、俯仰两个维度的角误差电压信号 [1] [4]。误差电压轨迹特征与目标角度偏差呈线性关系,构成闭环跟踪控制的基础 [1]。在单个脉冲周期内完成角度测量,消除传统扫描雷达的时间滞后误差采用数字信号处理技术,集成卡尔曼滤波算法提升跟踪稳定性 [4]毫米波系统(2025年数据)在中雨天气下对10平方米目标的探测距离达4.8公里,晴天可达10公里 [5]2025年研究显示,基于目标散射特性的相干干扰方法可有效破坏角跟踪能力 [3]。干扰机组网主瓣欺骗技术通过控制相位差(Δφ1-Δφ2)和功率比(犫²=θ0/(θ0-θ)),能...
- 苏州国内毫米波测距测速雷达厂家供应 2026-03-14
- 张家港信息化毫米波测距测速雷达费用 2026-03-14
- 常熟本地毫米波测距测速雷达推荐厂家 2026-03-14
- 吴中区质量毫米波测距测速雷达设计 2026-03-14
- 工业园区特种毫米波测距测速雷达现货 2026-03-14
- 苏州耐用毫米波测距测速雷达厂家直销 2026-03-14
- 昆山智能化毫米波测距测速雷达费用 2026-03-14
- 张家港耐用毫米波测距测速雷达价钱 2026-03-14
- 张家港国内毫米波测距测速雷达厂家供应 2026-03-14
- 吴中区信息化毫米波测距测速雷达报价 2026-03-14
- 张家港信息化毫米波测距测速雷达设计 2026-03-13
- 昆山信息化毫米波测距测速雷达供应 2026-03-13
- 工业园区特种毫米波测距测速雷达厂家供应 2026-03-13
- 吴中区本地毫米波测距测速雷达费用 2026-03-13
- 吴中区质量毫米波测距测速雷达优势 2026-03-13
- 相城区耐用毫米波测距测速雷达供应 2026-03-13




- 张家港附近毫米波测距测速雷达推荐厂家 03-15
- 相城区附近毫米波测风雷达供应 03-15
- 苏州质量毫米波测距测速雷达设计 03-14
- 苏州国内毫米波测距测速雷达厂家供应 03-14
- 张家港信息化毫米波测距测速雷达费用 03-14
- 姑苏区信息化毫米波通信厂家电话 03-14
- 张家港耐用毫米波测风雷达价钱 03-14
- 常熟智能化毫米波通信优势 03-14
- 姑苏区国内毫米波通信现货 03-14
- 工业园区信息化毫米波测风雷达优势 03-14