瑞士洛桑联邦理工学院科研团队在《自然·通讯》期刊上发表了一项关于可分离机械手的研究。该机械手可通过不同手指组合实现灵活抓握,并可脱离机身在狭窄空间中自主移动执行任务 [6]。2026年1月13日,智元机器人关联公司智元创新(上海)科技股份有限公司的“机械手”外观设计专利获授权。该设计用于智能机器人的...
工业机器人基本参数
- 品牌
- 翔富
- 型号
- 齐全
工业机器人企业商机
2025年10月13日,***新闻办公室举行新闻发布会,海关总署副署长王军在发布会上表示,2025年**季度,我国出口工业机器人增长54.9%。 [22025年12月,工业机器人“质量强链”项目累计完成33项关键任务,实现了从初步探索到系统推动、从技术研究到产业验证的重大转变。项目在标准、计量、检测、认证领域取得标志性进展:制定7项工业机器人国标、5项人工智能国标;建成动态轨迹精度计量校准装置;研制润滑油黏度标准物质;发布了覆盖整机、系统与**部件的认证规则。项目促进产业发展成效***:重载机器人精度提升1倍;平均无故障工作时间达12万小时;2025年国产点焊机器人***在汽车主机厂批量应用。通过“一测双证”国际合作机制,企业认证成本降低50%、周期缩短40%,国产机器人已成功进入欧盟、北美市场。 [2与物联网、大数据深度融合,构建智能生产系统。新吴区什么是工业机器人销售方法

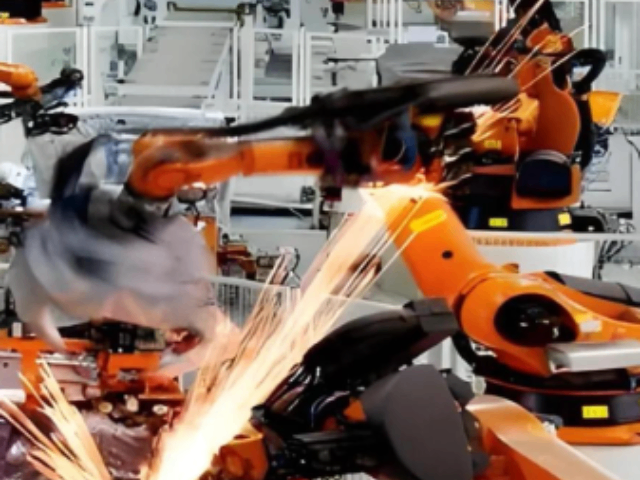
机器人-环境交互系统机器人-环境交互系统是实现机器人与外部环境中的设备相互联系和协调的系统。机器人与外部设备集成为一个功能单元,如加工制造单元、焊接单元、装配单元等。当然也可以是多台机器人集成为一个去执行复杂任务的功能单元 [29]。人机交互系统人机交互系统是人与机器人进行联系和参与机器人控制的装置。例如:计算机的标准终端、指令控制台、信息显示板、危险信号报警器等 [29]。控制系统控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。如果机器人不具备信息反馈特征,则为开环控制系统;具备信息反馈特征,则为闭环控制系统。根据控制原理可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运动的形式可分为点位控制和连续轨迹控制 [29]。常州附近工业机器人量大从优激光切割路径精细,切口无毛刺;钢结构焊接成型美观,适合大批量生产。

认知执行主要是指每安装完一条工业机器人设备,都需要进行详细的复查,如在安装完工业机器人的连接设备时,就需要对已经安装好的零部件进行关键尺寸的详细复查,这样可以避免因尺寸变化而造成整体返工的问题出现。而在所有的工业机器人设备全部安装结束后,还应该进行一次***的自检,要尽量在后期调试之前,及时发现问题,并针对性地做出解决,从而达到安装验收一次性合格的高标准,从而为工业机器人设备安装进度提供保障,确保工业机器人设备安装可以在规定的工期内完成。 [1
驱动系统驱动系统负责为机器人各关节提供动力支持,通常由电机、减速机构和传动部件等组成,其性能对机器人的速度响应、运动平稳性和定位精度具有重要影响。控制系统是工业机器人的**组成部分,主要用于执行程序指令、协调各关节运动以及管理输入输出信号,实现对机器人运动轨迹、姿态和作业流程的统一控制 [29]。感知系统感知系统用于获取机器人本体状态及作业环境信息,包括位置、速度、力或外部环境特征等数据,为控制系统提供反馈依据。通过传感信息的引入,工业机器人能够在复杂工况下保持稳定运行,并在一定程度上实现对作业过程的调整与优化。末端执行器是工业机器人直接与工件或工具接触的部件,其形式根据作业任务不同而有所差异,如夹持器、焊枪、喷枪或**工装等,是实现具体工业操作的重要接口 [29]。融合机械结构、伺服驱动、控制系统与信息技术,实现高精度运动控制。
基本组成工业机器人通常由三大部分六个子系统组成。三大部分是机械部分、传感部分和控制部分。六个子系统可分为机械结构系统、驱动系统、感知系统、机器人-环境交互系统、人机交互系统和控制系统。机械结构系统从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴的坐标原点,而并联机器人一个轴运动则不会改变另一个轴的坐标原点。早期的工业机器人都是采用串联机构。并联机构定义为动平台和定平台通过至少两个**的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。并联机构有两个构成部分,分别是手腕和手臂。手臂活动区域对活动空间有很大的影响,而手腕是工具和主体的连接部分。与串联机器人相比较,并联机器人具有刚度大、结构稳定、承载能力大、微动精度高、运动负荷小的优点。在位置求解上,串联机器人的正解容易,但反解十分困难;而并联机器人则相反,其正解困难,反解却非常容易 [29]。通过程序设定或示教输入调整工作流程,适应不同任务需求。江苏本地工业机器人五星服务
它装有许多凸轮,每一个凸轮分配给一个运动轴,转鼓运动一周便完成一个循环。新吴区什么是工业机器人销售方法
控制系统与轨迹规划控制系统是工业机器人实现自动化运行的**,其主要任务是根据作业需求生成运动指令,并协调各关节执行相应动作。工业机器人控制系统通常采用多轴协同控制方式,对位置、速度和加速度进行统一调度,以保证运动过程的平滑性和精度 [31]。轨迹规划是控制系统中的关键技术之一,其目标是在满足工艺要求和机械约束的前提下,为机器人生成合理的运动路径和时间规律。轨迹规划需要综合考虑关节极限、运动平稳性和作业效率等因素,以避免冲击、振动或碰撞问题。在实际工业应用中,轨迹规划结果直接影响生产节拍和加工质量,是衡量工业机器人性能的重要方面。新吴区什么是工业机器人销售方法
无锡翔富自动化设备有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的通信产品中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同翔富供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!
与工业机器人相关的文章

宜兴什么是工业机器人销售厂家
- 滨湖区附近工业机器人货源充足 2026-04-01
- 徐州质量工业机器人厂家供应 2026-04-01
- 锡山区附近工业机器人厂家供应 2026-04-01
- 无锡附近工业机器人销售厂家 2026-04-01
- 宜兴新一代工业机器人推荐货源 2026-04-01
- 锡山区新一代工业机器人货源充足 2026-04-01
- 无锡本地工业机器人货源充足 2026-04-01
- 江苏新一代工业机器人推荐货源 2026-04-01
- 锡山区质量工业机器人现货 2026-04-01
- 宜兴附近工业机器人服务热线 2026-04-01
- 常州本地工业机器人销售厂家 2026-04-01
- 惠山区本地工业机器人价目表 2026-04-01
与工业机器人相关的产品

与工业机器人相关的新闻
-
无锡什么是工业机器人货源充足 2026-03-31 22:12:553.生产效率及安全性高机械手,顾名思义,通过仿照人类的手型而生产出来的机械手,它生产一件产品耗时是固定的。同样的生存周期内,使用机械手的产量也是固定的,不会忽高忽低。并且每一模的产品生产时间是固定化,产品的成品率也高,使用机器人生产更符合老板利益。 [4]工厂采用工业机器人生产,是可以解决很多安全生...
-
新吴区附近工业机器人销售方法 2026-03-31 17:11:31作为现代制造体系中的基础装备,工业机器人在全球范围内的应用已从传统的装配线搬运和弧焊等场景扩展至分拣、检测、码垛、机床自动上下料等更复杂的工业作业任务。工业机器人已在汽车、电子、冶金、轻工、石化、医药等52个行业大类、143个行业中类广泛应用 [26]。与传统固定自动化设备相比,工业机器人在作业柔性...
-
南京本地工业机器人销售 2026-03-31 13:12:14执行机构机械手的执行机构分为手部、手臂、躯干;1、手部手部安装在手臂的前端。手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的**多。可根据夹持对象的形状和大小...
-
宜兴本地工业机器人货源充足 2026-03-31 18:11:402023年2月28日,国家统计局发布《中华人民共和国2022年国民经济和社会发展统计公报》,初步核算,2022年工业机器人产量44.3万套,比上年增长21.0%。 [9]2024年,广东省工业机器人产量达24万台,同比增长31.2%,占全国的40%以上。 [14]2025年1月17日,国家统计局消息...
与工业机器人相关的问题
新闻资讯
产品推荐
-
锡山区新一代工业机器人货源充足
2026-04-01 -
无锡本地工业机器人货源充足
2026-04-01 -
江苏新一代工业机器人推荐货源
2026-04-01 -

梁溪区新一代可穿戴智能设备销售厂家
2026-04-01 -
滨湖区新一代可穿戴智能设备销售方法
2026-04-01 -
新吴区什么是可穿戴智能设备现货
2026-04-01 -

江阴什么是可穿戴智能设备销售
2026-04-01 -
徐州质量可穿戴智能设备直销价
2026-04-01 -
常州什么是可穿戴智能设备价目表
2026-04-01