360度全景倒车影像在工程车周围安装能覆盖车辆周边所有视场范围的4个广角摄像头,对同一时刻采集到的多路视频影像处理成一幅车辆周边360度的车身俯视图,较后在中控台的屏幕上显示(有别于分割图像),可彻底消灭车辆周围的视觉盲点,它能让驾驶员实时在车内监控车外前、后、左、右视频画面的情况,避免意外事件发生。同时配备的前后超声波倒车雷达辅助倒车,更是驾驶员的第三只眼睛,让驾驶员清楚查看车辆周边是否存在障碍物并准确了解障碍物的相对方位与距离,避免了倒车时因驾驶员看不到车后和左右两边的情况而发生刮碰与车祸,并可以通过画面的指示调整入库、倒库的角度,帮助驾驶员安全轻松停泊车辆。精拓电子工程车360全景系统不抢屏,该显示的显示,不该显示的不显示。铲车360全景可视系统
360全景环视系统的产生背景:随着图像和计算机视觉技术的快速发展,越来越多的技术被应用到工程车电子领域,传统的基于图像的倒车影像系统只在车尾安装摄像头,只能覆盖车尾周围有限的区域,而车辆周围和车头的盲区无疑增加了安全驾驶的隐患,在狭隘拥堵的市区和停车场容易出现碰撞和刮蹭事件。为扩大驾驶员视野,就必须能感知360°各处的环境,这就需要多个视觉传感器的相互协同配合作用然后通过视频合成处理,形成全车周围的一整套的视频图像,就是有这类需求,全景视觉泊车辅助系统应运而生。吊车360全车可视系统采购精拓电子工程车360全景系统拼接处消除盲区。

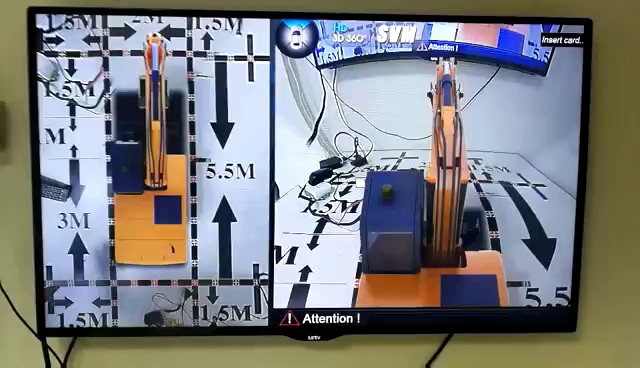
工程车360全景实时盲区预警系统可以和360°全景AI预警主机一起使用,自动检测驾驶员左,右,前,后两侧视野范围盲区,若该范围内出现车辆或其它移动物体则发出告警信息,并通过喇叭提示驾驶员注意移动物体,动态轨迹。可提供全天候无盲区的车周实时画面显示,结合比较新物体识别算法,为用户提供更安全的行车环境,减少作业视角盲区。工程车辆360全景实时盲区预警系统,机械车辆360全景盲区预警系统,特种车辆盲区防碰撞系统,工程车辆盲区防碰撞系统 ,机械车辆盲区防碰撞系统,农机车辆盲区防碰撞系统。
工程车360全景鸟瞰全景驾驶辅助系统(安装360度全景摄像头)通过安装在车身前后左右两侧的四个广角摄像头,同时收集车辆周围的图像,经过图像处理单元校正和拼接,形成一个360度全景的车辆周围,实时传输到中控台的显示设备。通过全景驾驶辅助系统的360度全景视图,驾驶员可以在坐在车内时可视地看到车辆的位置和车辆周围的障碍物,并方便地控制车辆停放到该位置或通过复杂的路面有效减少刮伤。碰撞和摔倒等事故。360度全景倒车影像可更加直观和安全可靠的辅助倒车,给广大车友带来极大的方便,因此必然成为泊车系统的新趋势。 精拓电子工程车360全景系统有着完善的文件管理。

工程车360度全景摄像头、工程车360度全景影像系统、工程车360度全景泊车系统、工程车360度全景可视系统、工程车360度全景倒车影像系统,通过安装在车身前后左右的4个超广角摄像头,同时采集车辆四周的影像,经过精拓专有的“实时图像畸变还原对接技术”对图像进行畸变还原—视角转化—图像拼接—图像增强等处理,较终形成一幅无缝完整的车周全景鸟瞰图。该系统不但可以显示全景图,还可同时显示任一方向的单视图;工程车驾驶员通过配合标尺线能够准确读出障碍物的位置和距离。 精拓电子工程车360全景系统遇到障碍物可以触发全景显示。铲车6路360全景品牌
精拓电子工程车360全景系统具备固态录像存储,录像意外提醒。铲车360全景可视系统
工程车360度全景影像系统:3D全屏当车速大于30km/h,处于安全考虑将自动关闭全景影像。在P档进入多媒体桌面的泊车影像图标,进入全景影像模式后,点击屏幕左侧悬浮键,调出360度功能菜单。360度功能菜单以三色轨迹线标示前后影像内实景距离本车的距离。静态轨迹线四个刻度从近到远分别为0.4m、0.8m、1.5m、3.0m。动态轨迹线,主要用于标记车辆车轮即将行驶至的位置,将随着驾驶员方向盘的转动而变化。倒档进入360度全景影像时,如果选择“R档退出5秒延迟”(在车机中设置),360度全景影像会在退出R档5秒后自动退出。如果没有选择“R档退出5秒延迟”,360度全景影像会在车速高于30km/h时自动退出。 铲车360全景可视系统
广州精拓电子科技有限公司是我国360全景影像,防碰撞预警系统,安全辅助驾驶系统,疲劳驾驶预警系统专业化较早的有限责任公司之一,公司位于田心大道8号三楼,成立于2006-05-10,迄今已经成长为汽摩及配件行业内同类型企业的佼佼者。精拓电子致力于构建汽摩及配件自主创新的竞争力,多年来,已经为我国汽摩及配件行业生产、经济等的发展做出了重要贡献。