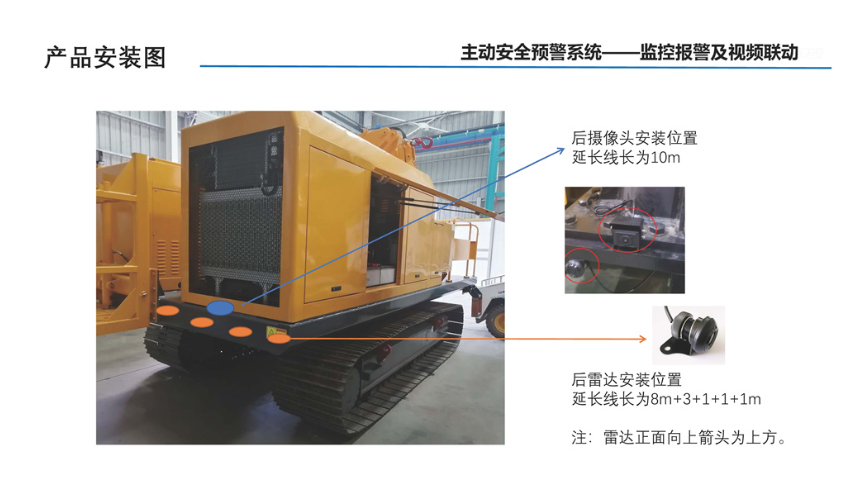
安装工程车360度全景摄像头与主机需要注意事项,摄像头安装:根据车型选择合适的位置和方式安装四个摄像头。一般来说,前视摄像头可以安装在车前中网或车标处;后视摄像头可以安装在车后牌照灯或后备箱扣手处;左右视摄像头可以安装在后视镜底部或侧裙处。安装时要注意避开发动机高温部分、车体遮挡部分、倒车信号线路等影响因素。控制主机安装:控制主机是连接四个摄像头和显示屏幕的设备。视频信号与显示器要适配,并找到ACC、GND、B+、倒车检测线等电源线路,并与本产品电源线相接。然后按图接好线束,并将OBD插头接到原车OBD插座或导航CAN插座,将录像U盘与产品上的USB母口对插。车侣工程车360全景影像系统在装卸货物中的应用效果如何?挖掘机360盲区侦测系统方案
车侣工程车360影像系统与普通车上用的360全景影像存在以下区别:应用范围不同:普通360全景影像主要是为了帮助汽车驾驶员更为直观、安全地停泊车辆,而工程车360影像系统不仅适用于停泊车辆,更重要的是在车辆行驶和作业过程中提供全可视的视觉辅助,例如在道路施工、现场勘查、装卸货物等场景能不同:普通360全景影像系统集成了360度全景影像、泊车辅助预警、行车记录仪等功能,主要作用是辅助汽车驾驶员更为直观、安全地停泊车辆。而工程车360影像系统在此基础上还增加了实时监控、盲区监测、驾驶员行为分析等功能,旨在实现全可视的视觉辅助,提高驾驶安全性和工作效率。总之,工程车360影像系统相对于普通车上用的360全景影像具有更广泛的应用范围和更丰富的功能,能够为工程车驾驶员提供更加四周和可靠的视觉辅助。 装载机360拼接算法品牌精拓电子工程车360全景系统可以帮助精拓电子工程车驾驶员更为安全的停泊车辆。

在工程车领域里,安装360全景影像系统的安装比例还比较低。由于工程车种类繁多,工作环境复杂,不同的车型有不同的驾驶需求和安全要求,因此安装360全景影像系统的需求也存在差异。此外,360全景影像系统的安装需要一定的技术和成本投入,因此也存在一些限制。但是,随着技术的不断发展和进步,360全景影像系统的安装比例正在逐渐提高。越来越多的工程车厂商和驾驶员开始认识到360全景影像系统的重要性,逐渐将其作为标准配置之一,以提高驾驶安全性和效率。未来,随着技术的不断发展和成本的降低,预计360全景影像系统的安装比例还将继续提高。
工程车360全景影像和倒车影像的区别:影像不同:360全景摄像头,倒车影像是专门用于倒车的,但是车子的侧面是基本看不到的,只能看到车子的后面。系统不同:360全景摄像头采用的是鱼眼式全景成像光学系统,无盲区,协调大视场覆盖和分辨力要求。倒车影像也叫作泊车辅助系统,或称倒车可视系统、车载监控系统等。英文名称:vehiclebackupcamera。该系统广泛应用于各类大、中、小车辆倒车或行车安全铺助领域。摄像头的个数是有区别的。倒车影像只安装一个摄像头,而360全景影像不同,一般安装4到6个摄像头。价格是有区别的。360全景影像设备的价格比倒车影像的价格更贵一点。精拓电子工程车360全景系统周围物体变形小。

在安装工程车360全景影像系统时,需要注意以下事项:摄像头的安装位置要合理,要能够捕捉到车辆周围的全部环境,避免出现盲区。摄像头安装要牢固,避免车辆行驶过程中的振动和摇晃,影响拍摄效果。摄像头电缆要理顺,避免缠绕和挤压,保证信号传输的稳定性。摄像头镜头要保持清洁,避免泥土、污垢等影响拍摄效果。摄像头角度和位置要调整合适,确保拍摄的画面清晰、准确。主机的安装要符合说明书要求,要选择合适的位置,避免阳光直射和震动,保证系统的稳定性。系统的布线要合理,要遵循车辆原有的电路系统,避免对车辆电路造成影响。系统的电源要稳定,要选择合适的电源适配器,避免电压波动和短路对系统的影响。系统要经过严格的测试和调试,确保功能正常、稳定,能够满足驾驶员的驾驶需求。总之,在安装工程车360全景影像系统时,需要严格按照说明书要求进行操作,注意系统的稳定性和安全性,确保安装质量和效果。 精拓电子工程车360全景系统的产品通过特殊的车规设计,于适应不同车型所处的恶劣的应用环境。吊车多路360拼接算法厂家
精拓电子的工程车360有哪些特点?挖掘机360盲区侦测系统方案
车侣工程车360全景影像系统是一种重要的安全辅助设备,在工程车行驶、作业过程中发挥着重要作用。为了满足实际应用的需求,工程车360全景影像系统需要具备以下品质要求:图像质量:系统采集的影像质量应该清晰、稳定,没有明显的波纹、噪点、锯齿、闪烁等现象,色彩应该鲜艳、对比度适中。实时性:系统应该能够实时采集、处理和显示车辆周围的影像信息,满足驾驶员对实时性的要求。可靠性:系统应该具有高可靠性和稳定性,能够长时间连续工作,并且不会因为环境温度、湿度等因素而出现明显的性能下降或故障。安全性:系统应该具有防雷、防火、防静电等性能,确保在恶劣的工作环境下能够安全运行。精确性:系统的感知和识别应该具有较高的精确性,能够准确识别车辆周围的物体,包括其他车辆、行人、障碍物等,避免误报和漏报。兼容性:系统应该能够与工程车的其他设备进行兼容,包括车载电脑、导航系统等,实现信息的共享和交互。综上所述,工程车360全景影像系统需要具备高质量的图像采集、实时性、可靠性、安全性、精确性以及良好的兼容性等品质要求,以确保系统在实际应用中的稳定性和可靠性。 挖掘机360盲区侦测系统方案