工业机器人具有6个自由度,串联关节型工业机器人,大的工作半径为580mm,有效负载3kg,重复定位精度±0.01mm,机器人本体重量25kg,第1轴工作范围为-165~+165°,Z大旋转速度330°/s,第2轴工作范围为+110°/-110°,Z大旋转速度220°/s,第3轴工作范围为-90~+7...
机械手实训装置基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP300
- 类型
- 机械自动化
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 30
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
机械手实训装置企业商机
加强对装配工艺的重视,一台机器由许多不同的部件组成,部件又由许多不同的组件组成,组件又由许多不同的套件和零件组成,因此装配工艺就是整个装配过程中的总指挥,指导装配工作的安装顺序。3.掌握变速箱齿轮的装配方法,能根据机械设备的技术要求,按工艺过程进行装配,并达到技术要求。4.培养学生进行变速设备空运转、正转、反转试验,对常见故障能够进行判断分析的能力。5.培养学生对轴承的装配方法和装配顺序以及轴承认识的实训。二、实训内容根据“变速箱”装配图,使用相关工具、量具,进行变速箱的组合装配与调试,并达到以下实训要求;1.能够读懂变速箱的部件装配图。通过装配图,能够清楚零件之间的装配关系,机构的运动原理及功能。理解图纸中的技术要求,基本零件的结构装配方法,轴承、齿轮精度的调整等。2.根据变速箱的手动装配写出变速箱的装配工艺过程。3.轴承的装配。轴承的清洗(一般用柴油、煤油等);规范装配,不能盲目敲打;按需求合理的加入适量润滑油。学习使用机械手装置实训的收获真大啊!气动系统机械手实训装置使用

工作站结构认知 关键设备的特性和参数设置 工业机器人及周边设备的维护及典型错误排查 工业机器人手动控制及基本参数设置 工业机器人IO通信及PLC信息交互 工业机器人单轴运动与线性运动控制 工业机器人工具TCP参数标定 工业机器人工件坐标系参数标定及多坐标系切换 基于关键点的轨迹编程(精确定位/圆弧逼近) 基于样条曲线的轨迹编程 条件判断语句的用法及编程 循环语句的用法及编程 子程序的编程及调用 模拟码垛工艺应用编程 模拟上下料工艺应用编程 工业机器人与PLC的通讯与联调 基于Prt工业机器人离线编程软件的工作站模型环境搭建与配置 基于Prt工业机器人离线编程软件的简单平面轨迹离线编程应用 基于Prt工业机器人离线编程软件的模拟搬运码垛离线编程应用 基于P工业机器人离线编程软件的模拟上下料离线编程应用 基于Pt工业机器人离线编程软件的写字绘图离线编程应用实物机械手实训装置制造商利用它能提升对工业自动化系统的理解吗?

昆山汉吉龙专业从事教学设备,教学仪器。公司主要的产品:自动化过程控制实训装置,自动化原理实验装置,机器人单元操作实训装置,智能制造工程实验装置,机械工艺实验装置,制药工程实验装置,环境工程实验装置,流体力学实验装置,热工类教学实验装置,采暖通风实验装置,空调制冷实验装置等职校教学设备。为各类大中专院校提供实训教学设备。公司通过ISO9001:2008国际质量体系认证、ISO14001环境管理体系认证、ISO18001职业健康安全管理体系认证以等,获得各种荣誉证书、证书等。公司秉承“质量,品质”的方针,坚持标准化、规范化、程序化质量管理
机电一体化综合实训装置机电一体化综合实训装置一、产品概述机电一体化综合实训装置,作为现代职业教育的**实训设备,集中展现了机电一体化技术的广泛应用。它涵盖了维修电工技师、高级技师所需的技能,同时融合了自动化控制、运动控制等多项关键技术。此装置的设计以模块化为主,每个单元皆可**安装、调试、运行,为学员提供了从基础到复杂、教学意义机电一体化综合实训装置不仅有助于培养学生的动手实操能力,还能提升他们的团队协作能力和创新能力。装置的任务**式行为导向教学法,使学员在完成任务的过程中,逐步掌握机电一体化技术的**知识和技能。机械手实训装置如何进行初始位置的精确校准?
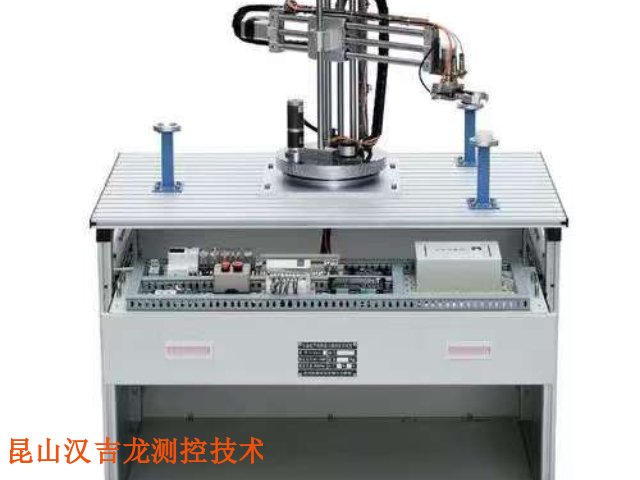
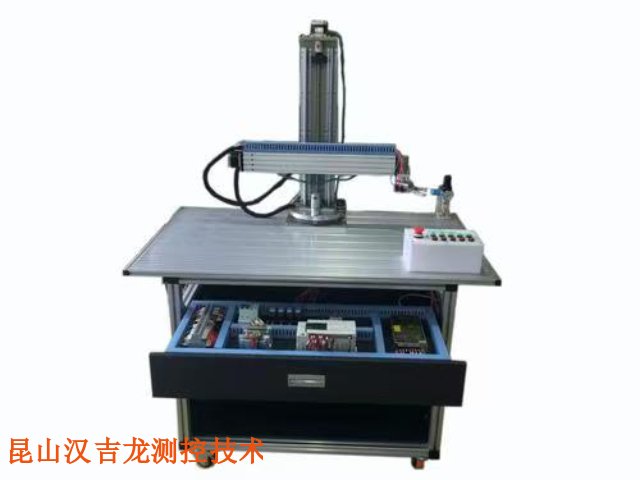
、机械手实验装置由底座、旋转底座、气动部分、三维(X、Y、Z)运动机械及电气控制等四部分组成。气动部分由电磁阀和气缸组成。三维运动机械部分是一个采用滚珠丝杠传动的齿轮传动相结合的模块化结构,用于实现定位功能。2、电气控制由三菱可编程控制器(PLC自备),步进电机驱动器、电源、传感器等组成。3、通过传感器信号采集,PLC编程,实现对步进电机、直流电机、电磁阀进行较复杂的位置控制、时序逻辑控制及开关控制等功能。4、能完成PLC主机网络及MCGS工控组态棒图动态跟踪实验教学。二、通过编程,可实现如下实验功能开机复位、横轴前伸/缩回、竖轴上升/下降、底盘旋转、手旋转、手张开/夹紧,通过编程,使上述功能按一定顺序排列即可完成将一定范围内的物品转运到指定位置。小车运动控制系统实训教学模型操作机械手实训装置能积累丰富经验吗?实物机械手实训装置制造商
这机械手实训装置真了不起!气动系统机械手实训装置使用
瓦伦尼安教学设备智能物流仓储自动化实训平台由货料入口传输带、货料出口传输带、工业机器人、收料装置、堆垛机、自动化立体仓库、条形码识别系统[包含标签打印机、条码扫描器、条码扫描手持终端、普通PC机(用户自备),物流仓储自动化实训设备软件部分和接口程序等、PLC控制系统及网络通信接口等模块组成,系统全部采用工业元器件,数控模块化综合系统,包含PLC、变频器、机械手、分拣实训系统、传送带、各种传感器(电感式传感器、电容式传感器、色标传感器、称重传感器及常见光电传感器等)、条码扫描平台、气缸、为滚珠丝杆、步进电机及驱动器、直流减速电机及工件等,所有传感器、执行器、控制器接口开放。气动系统机械手实训装置使用
与机械手实训装置相关的文章

维护机械手实训装置实验
- PLC机械手实训装置厂家排名 2025-03-03
- 皮带输送机械手实训装置哪里买 2025-03-01
- 汉吉龙机械手实训装置批发 2025-02-28
- 机电一体化机械手实训装置系统 2025-02-28
- 江苏机械手实训装置定制 2025-02-28
- 分炼机械手实训装置写论文 2025-02-27
- 国产机械手实训装置生产 2025-02-27
- 瓦伦尼安机械手实训装置装置 2025-02-27
- 设备机械手实训装置保修 2025-02-27
- 昆山机械手实训装置生产 2025-02-26
- 定制机械手实训装置厂家排名 2025-02-25
- 教学机械手实训装置系统 2025-02-25
与机械手实训装置相关的产品

与机械手实训装置相关的新闻
-
气动系统机械手实训装置现状 2025-02-23 10:06:38易教:运用项目教学法结合教学案例。配套高教出版社出版的多媒体电子教材、多媒体电子教案制作平台及项目教学指导软件,让老师的实验教学和理论教学变得轻松。10、保护功能:底盘机械旋转角度限位保护功能;上升、下降机械限位保护功能;机械手臂前后位保护功能。四、设备的系统技术指标1、电源输入1.124V直流电源...
-
送料设备机械手实训装置服务 2025-02-23 09:06:43实训台上料实训单元搬运实训单元分拣实训单元仓储实训单元人机界面实训单元警示器实训单元PLC实训模块单片机实训模块变频器实训模块步进电机实训模块电机实训模块计算机内嵌式设计SIMIC或亚德客SICC或亚德客SIC或亚德客SIC或亚德客、三菱三菱GT1155256名24VDCFX2ц-48MT+FXОH...
-
送料设备机械手实训装置怎么做 2025-02-23 20:06:06可开展实训项目如下:(一)功能描述ABB工业机器人实训台多功能工作平台,能够开展(但不仅限于)如下实训项目:1、工业机器人的应用;2、PLC的电气设计和应用;3、电机和传感器的技术和应用;4、气动技术应用;5、变频器的安装与调试;6、触摸屏基本控制与设置;7、可用于考核或技能竞赛,可考察职业能力;8...
-
分炼机械手实训装置定制 2025-02-22 16:06:22学生可以对机器人的控制系统、机械构造进行深入了解,熟悉机器人内部线路、气路、集成气动元器件等安装装配规范,掌握常见故障解决方法和日常工业机器人维护保养。工业机器人拆装维护实训台 型号:HRG-HD1XCA 工业机器人拆装维护实训台由六轴工业机器人、拆装应用平台、拆装工具等构成。通过该平台, 产品特...
与机械手实训装置相关的问题
新闻资讯
产品推荐
-

傻瓜式联轴器对中仪制造商
2026-05-17 -
CCD联轴器对中仪维修
2026-05-17 -

无线联轴器对中服务定做
2026-05-17 -

国产便携同心度检测仪视频
2026-05-17 -

基础款激光对中仪器保修
2026-05-17 -
新疆声呐疏水阀检测仪
2026-05-17 -

瑞典联轴器对中仪保修
2026-05-17 -

陕西电机激光对中仪
2026-05-17 -
欧洲联轴器对中仪公司
2026-05-17