eVTOL是指电动垂直起降飞行器,大力开展eVTOL试点,是对低空经济的强动力注入,而无人机正是这一领域的关键选择之一。无人机在低空经济中扮演者重要角色,随着应用领域的不断增多,未来无人机的数量将呈式增长,届时eVTOL起降中心将聚集众多各式各样的无人机,如何高效有序的让无人机彼此工作而不互相干扰是...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
传统意义上的根据视频的变化率报警,随着由于计算机的广泛应用和数字图像的发展,由于其设置的不灵活、虚警率高、不抗干扰及接口等方面的原因,正慢慢地面临淘汰;另外,在重要的场所,比如具有战略意义的油田油库,*仓库,重要的机密场所、办公地点,水利大坝等等,传统意义上的由人员操作控制键盘,锁定目标,控制云台的运动来跟踪目标的模式,由于存在监视范围大、人易疲劳和连续反应速度迟缓等方面的缺陷,这些领域对自动视频跟踪的需求日益迫切。振动测试是否通过正是确定板卡能否在这样的环境下正常完成工作的关键手段。江西工业目标跟踪
目标跟踪
YOLO单卷积神经网络在一次评价中直接从全图中预测多个boundingboxes和类概率,在全图上训练并直接优化检测性能,同时学习目标的泛化表示。然而,YOLO对边界框预测施加了严格的空间约束,限制了模型可以预测的相邻项目的数量。成群出现的小物件,如鸟类,对于此模型也同样有问题。fasterR-CNN,一个由全深度CNN组成的单一统一对象识别网络,提高了检测的准确性和效率,同时减少了计算开销。该模型集成了一种在区域方案微调之间交替的训练方法,使得统一的、基于深度学习的目标识别系统能够以接近实时的帧率运行,然后在保持固定目标的同时微调目标检测。吉林无线目标跟踪AI算法赋能下的图像处理板能够进行目标识别。

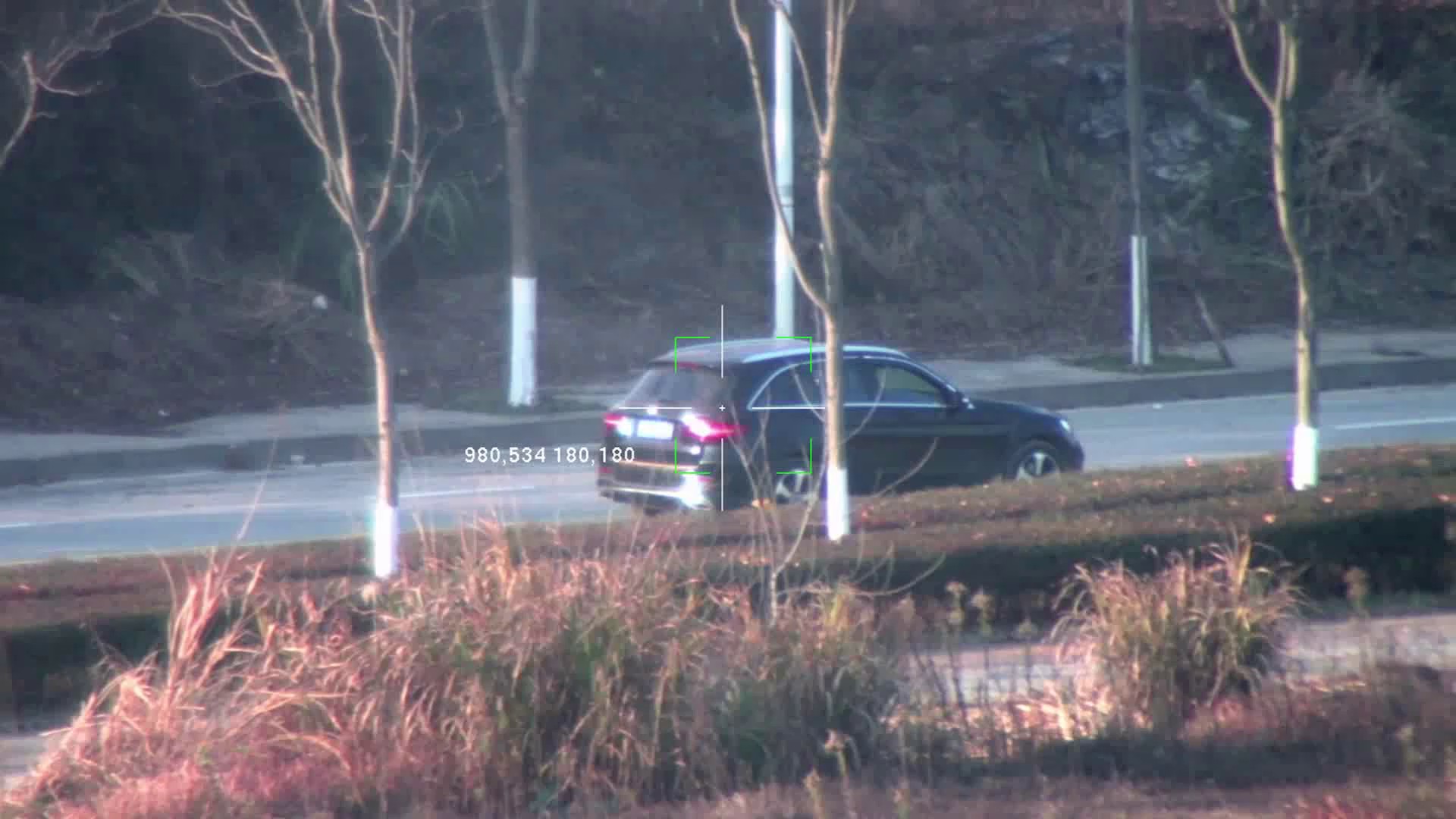
目标运动估计是根据目标在过去的位置对目标的运动规律加以总结,并以此对目标将来的运动状态进行预测。正确的预测,可以缩小匹配的计算区域,大幅的降低匹配计算量。在视频跟踪系统中由于被跟踪的目标处于运动状态,为了把目标始终保持在摄像机视野之内,必须对摄像机加以控制。在实际应用中,摄像机被固定在云台上,云台本身不做平移运动,但可以控制云台进行水平摆动和上下俯仰,从而带动摄像机做相应运动。所以,对摄像机的控制就是对云台的控制。
通常,遮挡可以分为三种情况:目标间遮挡、背景遮挡、自遮挡。对于目标之间的相互遮挡,可以选择根据目标的位置和目标特征的先验知识来处理这一问题。而对于场景结构的导致的部分遮挡此方法则难以判断,因为难以辨认究竟是目标形状发生变化还是发生遮挡。所以,处理遮挡问题的通用方法是用线性或非线性动态建模方法对运动目标进行,并在目标发生遮挡时,预测目标的可能位置,一直到目标重新出现时再修正它的位置。可以用卡尔曼滤波器来实现估计目标的位置,也可以用粒子滤波对目标做状态估计。成都慧视光电技术有限公司推出基于全国产化RV1126板的高性能图像跟踪板卡。

基于视频目标检测和跟踪的一般流程是:通过目标检测,找到目标;对目标特征进行描述,初步估计目标的运动矢量;根据运动状态,进入目标跟踪,对传感器的姿态,比如水平方位、垂直方位和焦距等进行调整;跟踪到目标后,对目标特征进行更新,并对目标的运动进行预测后,进入下一轮的跟踪过程。目标跟踪检测与跟踪涉及到的技术细节很多。慧视光电开发的高性能目标跟踪图像跟踪板在自研目标跟踪算法的作用下,能够实现高精度低延迟的视频目标锁定跟踪。RV1126搭载AI智能算法,实现目标识别与跟踪。网络目标跟踪要多少钱
跟踪板卡的定制哪家比较好?江西工业目标跟踪
目标检测和跟踪是计算机视觉领域中的重要任务之一。随着深度学习的兴起,YOLO(You Only Look Once)算法在目标检测和跟踪领域引起了广关注。YOLO算法是一种在实时目标检测和跟踪领域具有重要地位的算法。通过引入卷积神经网络和一系列先进技术,YOLO算法在速度和准确性方面取得了明显的进展。然而,仍然有一些挑战需要解决,如目标尺度变化、小目标检测和复杂背景干扰等。随着研究的不断深入和技术的不断发展,YOLO算法有望在实时目标检测和跟踪领域发挥更大的作用。江西工业目标跟踪
与目标跟踪相关的文章

江苏目标跟踪售后服务
- 贵州无线目标跟踪 2026-05-13
- 安全目标跟踪要多少钱 2026-05-12
- 视频目标跟踪服务电话 2026-05-11
- 吉林低压线目标跟踪 2026-05-11
- 数据目标跟踪优势 2026-05-11
- 工业目标跟踪售后服务 2026-05-10
- 国产化目标跟踪哪里买 2026-05-10
- 吉林哪里有目标跟踪 2026-05-10
- 新疆目标跟踪售后服务 2026-05-10
- 工业目标跟踪优势 2026-05-10
- 工业目标跟踪哪里好 2026-05-10
- 安徽目标跟踪工程 2026-05-09


与目标跟踪相关的新闻
-
宁夏工业目标跟踪 2026-05-09 02:01:03成都慧视光电技术有限公司开发的Viztra-HE030图像处理板,利用国产化高性能芯片RK3588开发而成,它能够实现6.0TOPS的算力,能够轻松应对粮库内部复杂的环境,成都慧视可以根据客户使用的相机接口进行图像处理板的接口深度定制,实现快速的AI害虫识别。在算法方面,可以使用自己的算法,我司还可...
-
高性能目标跟踪销售厂家 2026-05-09 17:01:27在如今的作业中,无人机路面巡查替代传统的人工巡查,展现出巨大的效率优势。像高速施工工地这样的环境下,施工方为了保障施工安全,就需要对施工范围进行严格管控,传统的人工巡查效率低,受限于地形、时间等问题,容易出现盲点。相比人工,利用无人机进行AI识别则可以逐帧图像监测,即便是夜晚也能够利用红外传感器进行...
-
快速目标跟踪售后服务 2026-05-09 07:01:24SpeedDP的出现则正好解决了这一问题,它是一个基于瑞芯微的深度学习算法开发平台,提供从数据标注、模型训练、测试验证到RockChip嵌入式硬件平台模型部署的可视化AI开发功能。平台支持本地化服务器部署,高校、特殊单位等数据敏感的用户无需担心数据信息泄露的问题。高校等单位可以通过模型训练和模型评估...
-
海南专业目标跟踪 2026-05-09 22:01:38随着科技的不断进步,食品检测设备也在持续创新升级。光谱分析技术、色谱技术、生物传感技术等先进技术被广泛应用于食品检测领域,使得检测更加高效、准确、灵敏。例如,基于纳米技术的传感器能够检测出极其微量的有害物质,为食品安全提供了更为可靠的保障。同时,智能化、自动化的食品检测设备也在逐渐普及,不仅提高了检...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

广西时省力图像处理板
2026-05-18 -

贵州图像处理板技术含量
2026-05-18 -

甘肃人脸识别图像识别模块解决方案
2026-05-18 -
广东智能化图像处理板
2026-05-18 -
陕西RK3399开发板图像识别模块高性能主板
2026-05-18 -

靠谱的图像处理板
2026-05-18 -
江西靠谱的图像处理板
2026-05-18 -
浙江信息化图像处理板
2026-05-18 -

河南图像识别模块软件开发
2026-05-18