
激光联轴器对中仪在高振动设备上的校准精度是否达标,取决于设备抗振设计、振动参数匹配度及现场操作控制,并非所有机型都能满足高振动场景需求。结合行业标准(如ISO1940、ISO10816)与实际应用案例,可从抗振性能分级、**技术保障、场景适配验证三方面展开分析:一、激光对中仪抗振性能的分级标准与精度...
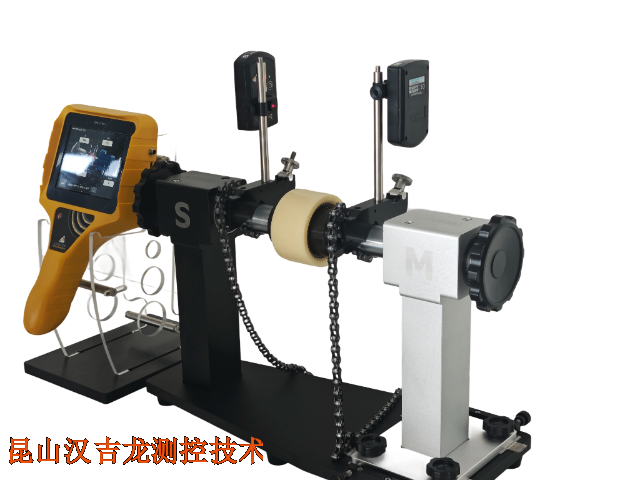
激光联轴器对中仪基本参数
- 品牌
- HOJOLO,LEAKSHOOTER
- 型号
- AS500
- 类型
- 激光对中仪
- 重量
- 1
- 产地
- 苏州
- 厂家
- 汉吉龙测控技术有限公司
激光联轴器对中仪企业商机
HOJOLO激光联轴器对中仪的校准精度是否受设备转速影响,**取决于型号功能配置与转速适配范围,**型号通过动态补偿技术可在宽转速区间保持稳定精度,而基础型号在高转速场景下可能因共振、光路抖动等问题出现精度波动,具体影响机制与应对能力可从以下三方面分析:一、转速对校准精度的影响机制设备转速主要通过机械振动传导与动态环境干扰两大路径影响校准精度,不同转速区间的影响程度差异***:低转速区间(≤1000rpm):此时轴系振动幅值较小(通常≤),HOJOLO全系列型号均能保持稳定精度。例如在电机-泵组(转速800rpm)校准中,基础型号(如AS300)的测量误差可控制在±,与静态校准精度一致。但需注意,若轴系存在安装间隙(如联轴器松动),即使低转速也可能引发周期性振动,导致激光光路出现±,需通过重复测量(3次以上)消除偶然误差。中高转速区间(1000-3000rpm):轴系振动幅值随转速升高呈线性增长(可达),基础型号因缺乏动态减振设计,支架可能随轴系共振,导致激光束抖动幅度增大至±,精度较静态下降约40%。而**型号(如AS500)通过合金防抖支架(阻尼系数)与激光束自动跟踪算法(响应时间≤),可实时补偿振动导致的光路偏移,将误差控制在±。 激光联轴器对中仪校准后的误差值,能控制在 0.01mm 以内吗?耦合激光联轴器对中仪用途
激光联轴器对中仪
多维偏差精细测量基于柔性联轴器的三维偏差特性(径向、角向、轴向复合偏差),采用“时钟法”完成全维度数据采集:测量点位选择:基础模式:转动轴系至12点、3点、6点三个位置(共旋转180°),每次停稳后按下测量键,HOJOLO设备通过双激光束+CCD探测器(1280×960像素)捕捉偏差数据;动态模式:针对高转速柔性联轴器(如3000rpm以上),启用HOJOLO的“动态捕捉”功能,实时采集运转中弹性体的形变偏差(采样频率100Hz);数据计算:设备自动生成偏差报告,例如某弹性联轴器测量结果显示:径向偏差0.12mm、角向偏差0.5°、轴向偏差0.08mm,系统同步标注各偏差是否超出设备允许阈值。基础款激光联轴器对中仪厂家激光联轴器对中仪校准柔性联轴器的具体步骤是什么?

不同类型柔性联轴器的校准案例验证了激光对中仪的精度适用性:弹簧体式柔性联轴器:某矿山破碎机采用该类型联轴器,校准前径向偏差0.15mm,激光对中仪校准后降至0.02mm,轴承温度从72℃降至45℃,联轴器使用寿命延长2倍;弹性体柔性联轴器:某制药厂离心泵(转速3000rpm)校准前,2倍转频振动幅值0.1mm,通过HOJOLOAS500校准后,偏差控制在0.02mm(符合转速3000rpm时柔性联轴器“优良”等级偏差标准≤0.04mm),电机电流从12.2A降至11.8A,能耗降低3.28%;滑块式柔性联轴器:某钢厂减速机联轴器校准前角向偏差0.8°,超出允许阈值(0.5°),激光对中仪通过角度偏差精细化调整,将偏差修正至0.1°,设备运行噪音从85dB降至72dB。
柔性联轴器专项调整策略结合HOJOLO的算法优势与柔性联轴器的弹性特性,采用“分步调整+动态补偿”方案:参数输入与补偿设置:进入设备的“柔性联轴器模式”,输入弹性体材质参数(如聚氨酯弹性模量2.5GPa)、工况温度(如正常运行温度70℃),系统自动加载热膨胀补偿算法(例如高温下弹性体径向膨胀系数1.2×10⁻⁵/℃);地脚调整:根据设备生成的调整方案操作,例如电机前地脚需增加0.2mm垫片、后地脚减少0.1mm垫片,调整时采用“对角紧固”原则(避**侧受力导致弹性体形变),每调整一次复核软脚状态(防止垫片变化引发新软脚)。2.精度验证与迭代优化静态复核:调整后重新执行12/3/6点测量,确保残余偏差符合标准(如API610规定离心泵柔性联轴器平行偏差≤0.05mm/m,HOJOLO校准后可控制在0.02mm/m以内);动态验证:装复联轴器螺栓(按对角线分次拧紧,扭矩符合手册要求,如M16螺栓扭矩45-50N・m),启动设备空载运行30分钟,用HOJOLO的振动监测模块(部分型号集成)检测振动速度,需满足ISO10816-3标准:柔性联轴器机组振动速度≤4.5mm/s(例如某破碎机校准后振动从12mm/s降至3.8mm/s)。激光联轴器对中仪的校准精度是否可根据需求自主调节?

激光联轴器对中仪的动态补偿技术,是通过多传感数据融合、实时算法修正、工况模型适配三大**机制,抵消设备运行中振动、温度变化、安装偏差等动态干扰,维持校准精度的稳定性。以HOJOLOAS500等**型号为例,其技术原理可拆解为“干扰感知-数据处理-偏差修正”的全流程闭环,具体工作机制如下:一、动态干扰的多维度感知:传感器矩阵实时捕捉异常信号动态补偿的前提是精细识别干扰源,仪器通过集成多类型传感器,构建***干扰监测体系:双激光束对比传感:采用635-670nm双半导体激光发射器,两束激光平行投射至CCD探测器(分辨率达)。当设备振动(如中高转速下的轴系共振)导致测量单元偏移时,两束激光的光斑偏移量会产生微小差异,系统通过计算差值剔除共性振动干扰(如支架共振引发的同步偏移),*保留轴系真实对中偏差。例如在3000rpm压缩机校准中,单激光测量可能因振动产生±,双激光对比可将误差压缩至±。数字倾角仪实时监测:内置高精度倾角传感器(精度±°),持续检测测量单元的安装姿态变化,主要针对两类偏差:一是软脚偏差(地脚螺栓松动或基础沉降导致的轴系倾斜),当倾角变化超过°时,系统自动计算倾斜角度对激光光路的影响,修正径向偏差数据。激光联轴器对中仪在动态校准模式下,精度比静态校准更高吗?基础款激光联轴器对中仪厂家
激光联轴器对中仪针对不同材质的联轴器,校准精度是否一致?耦合激光联轴器对中仪用途
HOJOLO各型号在多轴系校准中的精度表现差异,可通过具体行业案例进一步验证:精密制造场景(五轴加工中心):AS500在某摇篮式五轴机床校准中,通过双激光技术检测出X轴导轨直线度偏差0.015mm/m,经校准后直线度提升至0.003mm/m,加工零件的平面度误差从0.08mm降至0.01mm。其红外热成像与振动分析功能还能同步诊断多轴联动时的潜在故障,例如识别出C轴轴承因对中偏差导致的1X频率振动超标,提前避免加工表面划痕缺陷。重型工业场景(多轴传动系统):中端型号AS300在水泥厂窑头电机多轴校准中,采用双模激光传感系统实现0.005mm/m的直线度校准精度,通过分段温度补偿模式适应窑体高温环境(温度波动50-120℃),确保电机轴与窑体连接轴系的对中偏差始终≤0.02mm,避免因热变形导致的联轴器磨损加剧问题。基础场景(常规多轴泵组):手持式基础型号虽未配备双激光补偿功能,但凭借单激光源与简化算法,仍能实现±0.01mm的校准精度,可满足电机-泵组多轴系的基础对中需求,例如将某化工泵组的轴系径向偏差从0.08mm调整至0.03mm以内,确保设备运行振动值符合工业标准(≤4.5mm/s)。耦合激光联轴器对中仪用途
与激光联轴器对中仪相关的文章
马达激光联轴器对中仪找正方法
- 新一代激光联轴器对中仪找正方法 2026-05-09
- 教学激光联轴器对中仪使用方法图解 2026-05-09
- 基础款激光联轴器对中仪的作用 2026-05-09
- 多功能激光联轴器对中仪电话 2026-05-09
- 耦合激光联轴器对中仪用途 2026-05-09
- 汉吉龙激光联轴器对中仪价格 2026-05-08
- 工业激光联轴器对中仪装置 2026-05-08
- 昆山激光联轴器对中仪电话 2026-05-08
- 傻瓜式激光联轴器对中仪找正方法 2026-05-08
- 电机激光联轴器对中仪工作原理 2026-05-08
- synergys激光联轴器对中仪调试 2026-05-08
- ASHOOTER激光联轴器对中仪哪家好 2026-05-08
与激光联轴器对中仪相关的产品



与激光联轴器对中仪相关的新闻
-
HOJOLO激光联轴器对中仪装置 2026-05-07 16:02:34安装与操作:适配柔性联轴器的便捷性设计1.固定方式:无损安装优先柔性联轴器法兰面通常无需额外加工,需选择非破坏性安装的探头:磁吸式底座:强磁吸附设计(如HOJOLO标配的强磁底座),5分钟内可完成安装,适配各类金属轴头,避免钻孔焊接损伤联轴器;可调支架:针对不规则轴面(如多边形轴),需搭配V型可调支...
-
转轴激光联轴器对中仪 2026-05-07 13:02:20HOJOLO通过硬件与算法的协同设计,从根源上抵消恶劣工况的精度干扰:1.激光测量系统优化低发散角激光源:采用635-670nm半导体激光器,发散角≤0.1mrad,即使在粉尘散射环境中,10m跨距内光斑直径仍控制在1mm以内,避免探测器接收信号失真;高分辨率CCD探测器:搭载1280×960像素C...
-
AS500激光联轴器对中仪哪家好 2026-05-07 01:02:07HOJOLO激光联轴器对中仪的校准精度是否受设备转速影响,**取决于型号功能配置与转速适配范围,**型号通过动态补偿技术可在宽转速区间保持稳定精度,而基础型号在高转速场景下可能因共振、光路抖动等问题出现精度波动,具体影响机制与应对能力可从以下三方面分析:一、转速对校准精度的影响机制设备转...
-
汉吉龙激光联轴器对中仪校准规范 2026-05-06 07:02:44HOJOLO激光联轴器对中仪不同型号间的校准精度存在明显差异,这种差异主要由硬件配置、技术方案及功能定位的不同决定,具体可从精度参数、**技术和适用场景三方面体现:一、精度参数的直接差异从现有型号的公开数据来看,HOJOLO各系列产品的精度指标存在***层级划分:**型号(如ASHOOTERAS50...
与激光联轴器对中仪相关的问题
新闻资讯
产品推荐
-

汉吉龙测控对中仪服务哪家好
2026-05-09 -
新一代激光联轴器对中仪找正方法
2026-05-09 -

教学激光联轴器对中仪使用方法图解
2026-05-09 -

S和M轴对中校准测量仪维修
2026-05-09 -

HOJOLO振动激光对中仪维修
2026-05-09 -

机械轴对中激光仪批发
2026-05-09 -
基础款设备安装对心校准仪视频
2026-05-09 -

耦合激光对中仪器特点
2026-05-09 -

轴对中激光仪使用方法图解
2026-05-09