
激光联轴器对中仪在高振动设备上的校准精度是否达标,取决于设备抗振设计、振动参数匹配度及现场操作控制,并非所有机型都能满足高振动场景需求。结合行业标准(如ISO1940、ISO10816)与实际应用案例,可从抗振性能分级、**技术保障、场景适配验证三方面展开分析:一、激光对中仪抗振性能的分级标准与精度...
激光联轴器对中仪基本参数
- 品牌
- HOJOLO,LEAKSHOOTER
- 型号
- AS500
- 类型
- 激光对中仪
- 重量
- 1
- 产地
- 苏州
- 厂家
- 汉吉龙测控技术有限公司
激光联轴器对中仪企业商机
软脚检测(柔性联轴器校准关键前置环节)柔性联轴器的弹性补偿特性易掩盖软脚导致的隐性偏差,需优先通过激光对中仪的软脚测试功能消除底座形变干扰:参数设置:启动HOJOLO设备并进入“Softfoot”模式,输入测量参数:S(固定端激光探头)到M(移动端探头)的距离;S到动设备前地脚(F1)、后地脚(F2)的水平跨度;点位测量:将联轴器转动至12点钟位置(正上方),调整激光发射器使光束落在接收靶中心;依次松开并重新拧紧每个地脚螺栓,记录位移变化量(如松开螺栓时位移量>0.06mm需处理软脚);软脚处理:对超差地脚(如某脚位移0.07mm),通过增减不锈钢垫片(厚度精度0.01mm)找平,重复测量直至所有地脚位移量≤0.05mm(例如HOJOLO校准某风机时,将原0.08mm软脚偏差修正至0.02mm)。激光联轴器对中仪针对特殊结构的联轴器,校准精度是否适用?教学激光联轴器对中仪使用方法图解
激光联轴器对中仪
激光联轴器对中仪的校准精度支持实时数据验证,且验证功能已成为中**设备的**配置之一。其实现原理围绕激光测量系统的动态数据采集能力,结合多维度交叉验证逻辑,确保校准过程中偏差数据的真实性与准确性。以下从技术实现、验证维度、操作流程及品牌案例四方面展开说明:一、实时数据验证的技术基础激光对中仪的实时验证功能依托硬件精度与算法优化实现,**技术包括:高频数据采集模块:采用高分辨率CCD探测器(如30mm视场、1280×960像素),每秒可完成数百次激光光斑位置捕捉,即使设备运行中存在微小振动或位移,也能实时捕捉偏差变化。例如HOJOLO的ASHOOTER系列,激光波长稳定在635-670nm,光束发散角极小,配合1μm分辨率的探测器,可实时识别。动态补偿算法:设备内置倾角仪与无线传感器,实时监测测量单元的安装姿态(如倾斜角度、同心度偏差),并通过几何算法自动修正误差。例如轴旋转过程中,若测量支架轻微松动导致激光光斑偏移,系统可根据倾角数据实时补偿,确保偏差计算不受安装姿态影响。多参数联动分析:部分**机型集成振动、温度监测模块,将对中偏差数据与设备运行参数(如1X转速频率振动幅值、轴承温度)实时关联。当对中不良时。 教学激光联轴器对中仪调试激光联轴器对中仪的校准精度会受到设备转速的影响吗?

为确保校准精度有效落地,需规避以下误区:避免“过度依赖补偿”:柔性联轴器的偏差补偿并非无限制,例如当两种偏差同时存在时,允许值需减半。激光对中仪需严格按此标准校准,而非*满足单一偏差要求;规范安装流程:校准前需拆除联轴器联接螺栓,检查并消除软脚偏差(软脚会导致设备运转时产生额外形变),否则会导致校准精度衰减30%以上;定期复校维护:激光对中仪的光学部件(如激光发射器)连续工作5000小时后需校准,避免光斑偏移影响精度(如HOJOLO激光模块未定期维护时,光斑偏移量可能增加0.003mm)。激光联轴器对中仪针对柔性联轴器的校准精度完全适用,不仅能覆盖其偏差控制范围,还可通过专项算法与流程优化实现微米级精度提升。实际应用中,多数场景下振动、温度等关键指标优化幅度达 60%-90%,***优于传统校准方法。
激光联轴器对中仪短时间内重复校准的精度数据并非***一致,而是存在“可控重复性偏差”,其一致性水平由仪器自身性能、操作规范性及环境稳定性共同决定。结合行业标准(如JJF(浙)1196-2023)与实际应用场景,可从重复性指标定义、影响因素及数据验证方法三方面***解析:一、精度数据重复性的量化标准激光对中仪的重复性精度有明确行业校准规范,**指标需满足“多次测量结果的离散度≤仪器标称精度的1/3”,具体表现为:1.位移与角度重复性的数值范围根据JJF(浙)1196-2023校准规范,激光对中仪需通过10次往复测量计算重复性误差(公式:s=n−11∑i=1n(Di−Dˉ)2,其中Di为单次示值,Dˉ为平均值)。工业级设备的典型重复性表现为:位移重复性:**双激光机型(如HOJOLO双激光系列)可达≤,普通单激光机型通常≤(即1丝);角度重复性:倾角示值变动性≤±2个分辨力,如°分辨力机型的角度重复性偏差≤±°。对比传统百分表(重复性偏差≥),激光对中仪的短时间重复校准数据一致性***更优,但仍存在微小波动(非完全一致)。 激光联轴器对中仪配备专业技术团队,随时提供上门指导服务。
激光对中仪需通过多维度技术设计抵消长距传输中的精度损耗,**稳定机制包括:1.激光传输与探测优化低发散角激光设计:工业长距级机型采用发散角≤(普通机型为),跨距20m时光斑直径可控制在2mm以内,避免探测器接收信号失真;高灵敏度信号增强:CCD探测器搭载数字信号处理(DSP)芯片,可放大微弱激光信号(比较低探测阈值μW),即使跨距30m仍能捕捉。2.环境干扰补偿算法大气折射补偿:通过内置温度-湿度传感器实时采集环境参数,利用折射率修正公式(n=1+×T/273,T为环境温度)补偿空气密度变化导致的激光折射偏差,温度波动±5℃时精度修正量≤±;振动与倾斜修正:集成高精度数字倾角仪(精度°)与振动传感器,实时修正设备安装倾斜(≤3°)及基础振动(≤5mm/s)引发的基准偏移,确保测量基准稳定性。3.安装基准与数据验证无线组网同步:多传感器无线组网(传输延迟≤10ms)实现轴系多截面同步测量,避**截面测量的基准偏差,如印刷机多滚筒轴校准中,通过3组传感器同步采集数据,平行度精度提升至±;3D动态视图校准:(绿/黄/红三色标记公差范围),操作人员可直观判断调整方向,减少反复测量导致的累积误差。 激光联轴器对中仪的校准精度可以达到什么行业标准准?工厂激光联轴器对中仪保养
激光联轴器对中仪在动态校准模式下,精度比静态校准更高吗?教学激光联轴器对中仪使用方法图解
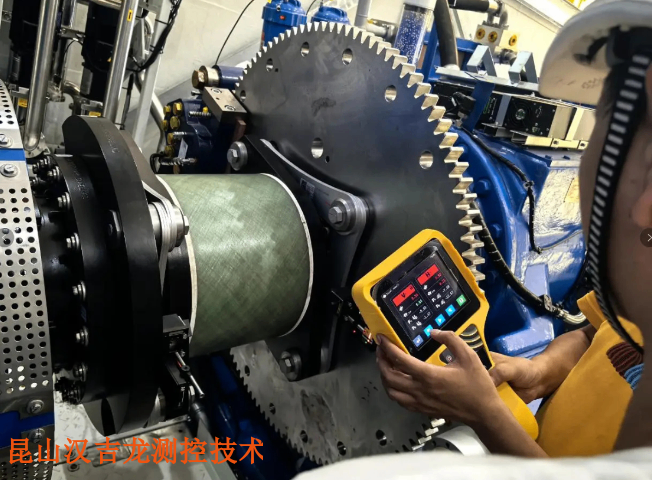
即使采用抗振机型,操作不当仍可能导致精度不达标,需遵循以下规范:1.精度验证方法动态数据一致性检查:连续采集5组对中数据,若位移偏差波动≤0.003mm(工业抗振级机型),则判定振动干扰已有效抵消;外部基准对比:用高精度千分表(精度0.001mm)同步测量对中偏差,若激光仪数据与千分表差值≤0.005mm,则精度达标。2.关键操作要点安装位置优化:传感器需安装在距联轴器≤50mm处,避免振动放大效应(如轴端振动在300mm处会放大2-3倍);软脚与预调平:先消除设备软脚(地脚间隙>0.05mm需调整),确保基座水平误差<0.02mm/m,减少振动导致的设备整体晃动;参数预置补偿:对于热态高振动设备(如汽轮机),需预置热膨胀补偿量(0.20-0.30mm),避免冷态校准后热态运行时偏差超标。教学激光联轴器对中仪使用方法图解
与激光联轴器对中仪相关的文章
马达激光联轴器对中仪找正方法
- 新一代激光联轴器对中仪找正方法 2026-05-09
- 教学激光联轴器对中仪使用方法图解 2026-05-09
- 基础款激光联轴器对中仪的作用 2026-05-09
- 多功能激光联轴器对中仪电话 2026-05-09
- 耦合激光联轴器对中仪用途 2026-05-09
- 汉吉龙激光联轴器对中仪价格 2026-05-08
- 工业激光联轴器对中仪装置 2026-05-08
- 昆山激光联轴器对中仪电话 2026-05-08
- 傻瓜式激光联轴器对中仪找正方法 2026-05-08
- 电机激光联轴器对中仪工作原理 2026-05-08
- synergys激光联轴器对中仪调试 2026-05-08
- ASHOOTER激光联轴器对中仪哪家好 2026-05-08
与激光联轴器对中仪相关的产品



与激光联轴器对中仪相关的新闻
-
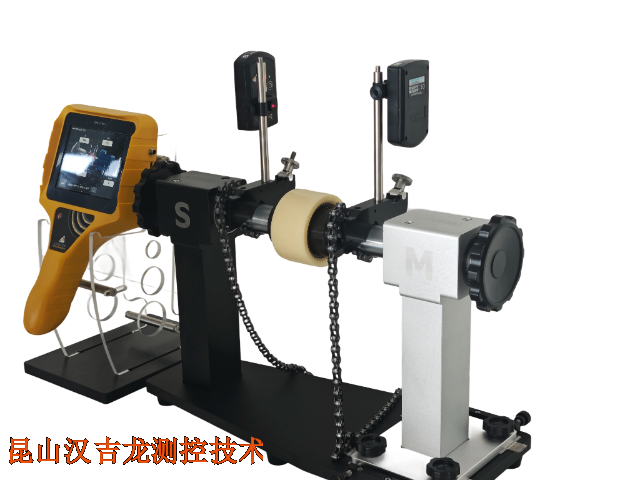
HOJOLO激光联轴器对中仪装置 2026-05-07 16:02:34安装与操作:适配柔性联轴器的便捷性设计1.固定方式:无损安装优先柔性联轴器法兰面通常无需额外加工,需选择非破坏性安装的探头:磁吸式底座:强磁吸附设计(如HOJOLO标配的强磁底座),5分钟内可完成安装,适配各类金属轴头,避免钻孔焊接损伤联轴器;可调支架:针对不规则轴面(如多边形轴),需搭配V型可调支...
-
转轴激光联轴器对中仪 2026-05-07 13:02:20HOJOLO通过硬件与算法的协同设计,从根源上抵消恶劣工况的精度干扰:1.激光测量系统优化低发散角激光源:采用635-670nm半导体激光器,发散角≤0.1mrad,即使在粉尘散射环境中,10m跨距内光斑直径仍控制在1mm以内,避免探测器接收信号失真;高分辨率CCD探测器:搭载1280×960像素C...
-
AS500激光联轴器对中仪哪家好 2026-05-07 01:02:07HOJOLO激光联轴器对中仪的校准精度是否受设备转速影响,**取决于型号功能配置与转速适配范围,**型号通过动态补偿技术可在宽转速区间保持稳定精度,而基础型号在高转速场景下可能因共振、光路抖动等问题出现精度波动,具体影响机制与应对能力可从以下三方面分析:一、转速对校准精度的影响机制设备转...
-
汉吉龙激光联轴器对中仪校准规范 2026-05-06 07:02:44HOJOLO激光联轴器对中仪不同型号间的校准精度存在明显差异,这种差异主要由硬件配置、技术方案及功能定位的不同决定,具体可从精度参数、**技术和适用场景三方面体现:一、精度参数的直接差异从现有型号的公开数据来看,HOJOLO各系列产品的精度指标存在***层级划分:**型号(如ASHOOTERAS50...
与激光联轴器对中仪相关的问题
新闻资讯
产品推荐
-
基础款设备安装对心校准仪视频
2026-05-09 -

耦合激光对中仪器特点
2026-05-09 -

轴对中激光仪使用方法图解
2026-05-09 -
机械联轴器不对中测量仪找正方法
2026-05-09 -

基础款激光联轴器对中仪的作用
2026-05-09 -

马达对中仪演示
2026-05-09 -

经济型角度偏差测量仪贴牌
2026-05-09 -

经济型对中仪服务工作原理
2026-05-09 -

CCD联轴器振动红外对中仪特点
2026-05-09